전기 드라이브
예제를 통해 비동기기, 동기기, 스위치 릴럭턴스 머신 및 제어를 모델링하는 방법을 알아봅니다.
추천 예제

전기 드라이브 시스템의 4사분면 동작 시각화하기
이 예제는 4개의 사분면 모두에서 동작하는 Motor & Drive (System Level) 블록의 토크-속도 궤적을 시각화하는 데 도움이 됩니다.
Design PID Control for DC Motor Using Classical Control Theory
Design a PID controller for a DC Motor using classical control theory. Alternatively, you can use Steady State Manager, Model Linearizer, Frequency Response Estimator, or PID tuner apps to streamline the design.

Classify Motor Faults Using Deep Learning
Train a deep learning model to classify faults in a permanent magnet synchronous motor (PMSM) using simulated data across various revolutions per minute (RPM). You use Simscape Electrical™ to create the model for a fault scenario, then use Deep Learning Toolbox™ to train a neural network to classify the fault data.
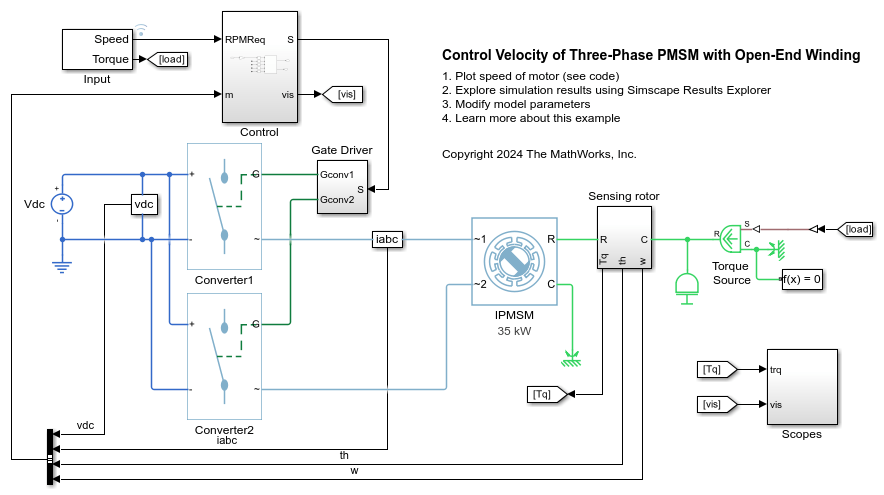
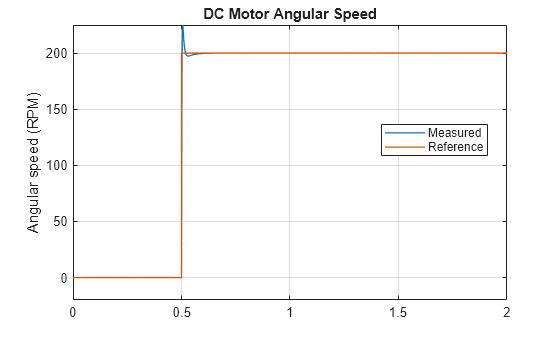
개방 권선이 있는 3상 PMSM의 속도 제어하기
이 예제에서는 개방 권선이 있는 매립형 영구 자석 동기기(IPMSM)의 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 2개의 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. IPMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 토크 소스가 부하를 제공합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다. Control 서브시스템은 PI 기반 자속 기준 제어 구조를 포함합니다. 1초의 시뮬레이션 중에 각속도 요구량은 0rpm, 500rpm, 2000rpm, 그런 다음 3000rpm입니다.
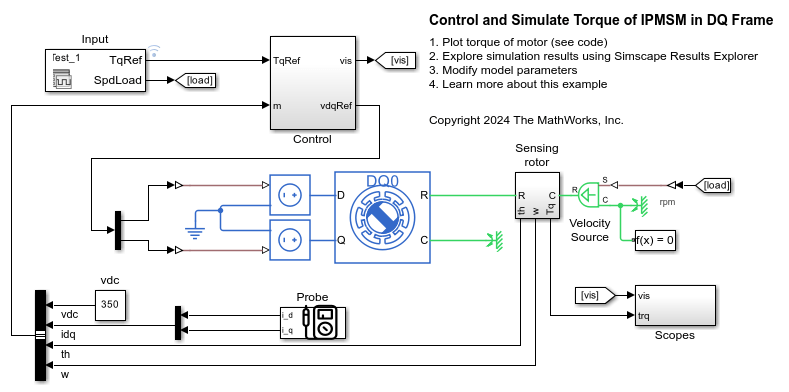
DQ 프레임에서 IPMSM의 토크를 제어하고 시뮬레이션하기
이 예제에서는 IPMSM(매립형 영구 자석 동기기)의 자동차 전기 견인 드라이브에서 토크를 제어하는 방법을 보여줍니다. 이 예제에서는 회전자 DQ(직접 직교) 기준 프레임에서 토크를 제어하고 시뮬레이션합니다. DQ 기준 프레임을 사용하여 제어기를 설계하고 시뮬레이션 속도를 높일 수 있습니다. IPMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 IPMSM 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 제어 알고리즘은 토크 요청을 관련된 전류 기준으로 변환합니다. 기준 DQ 전압이 IPMSM에 공급됩니다. 시뮬레이션에는 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝이 포함됩니다.
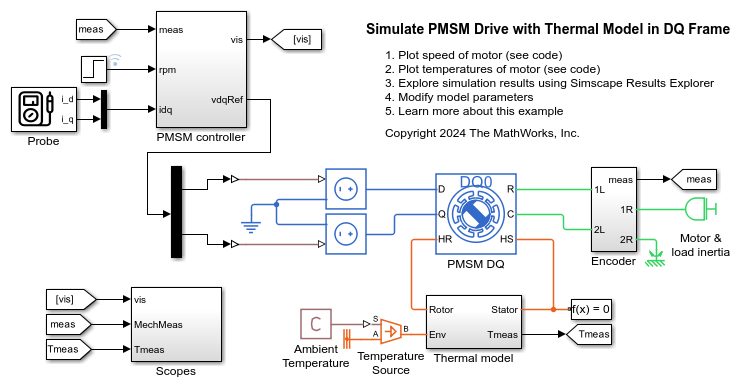
DQ 프레임에서 열 모델이 있는 PMSM 드라이브 시뮬레이션하기
이 예제에서는 DQ(직접-직교) 기준 프레임에서 PMSM(영구 자석 동기기)을 시뮬레이션하는 방법을 보여줍니다. PMSM은 열 모델과 경험적 철손을 포함합니다. PMSM 제어기를 설계하고 원하는 성능을 얻기 위해 이 모델의 아키텍처와 이득을 선택합니다. 고정자와 회전자의 초기 온도는 섭씨 25도입니다. 주변 온도는 섭씨 27도입니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

위치 센서 없이 BLDC 모터의 속도 제어하기
이 예제에서는 위치 센서를 사용하지 않고 BLDC(브러시리스 직류) 전기 드라이브의 속도를 제어하는 방법을 보여줍니다. 제어된 3상 인버터를 통해 DC 전압원이 BLDC에 전력을 공급합니다. Control 서브시스템은 센서리스 속도 제어 전략을 구현합니다. 히스테리시스 제어기는 상 전류를 제어합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
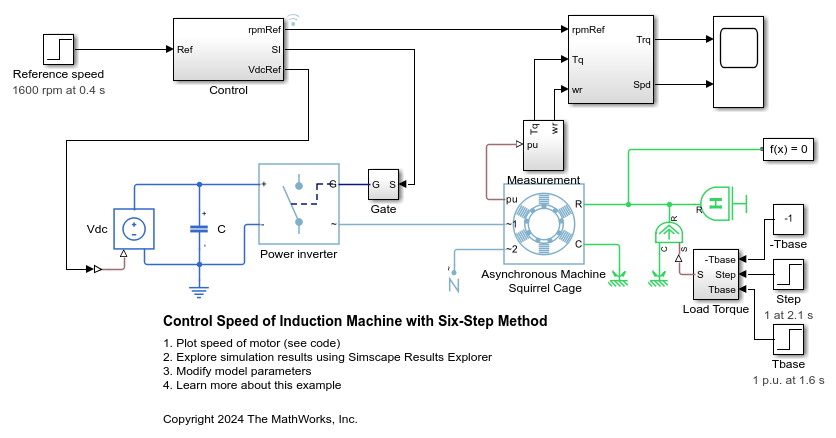
6단계 방법으로 유도기 속도 제어하기
이 예제에서는 6단계 스칼라 제어 방법을 사용하여 비동기기(ASM) 드라이브에서 회전자 속도를 제어하는 방법을 보여줍니다. 제어 알고리즘은 기준 속도를 기준 주파수로 변환합니다. 제어기는 전압 대 주파수 비를 일정하게 유지하면서 기준 주파수에서 게이트 펄스를 생성합니다.
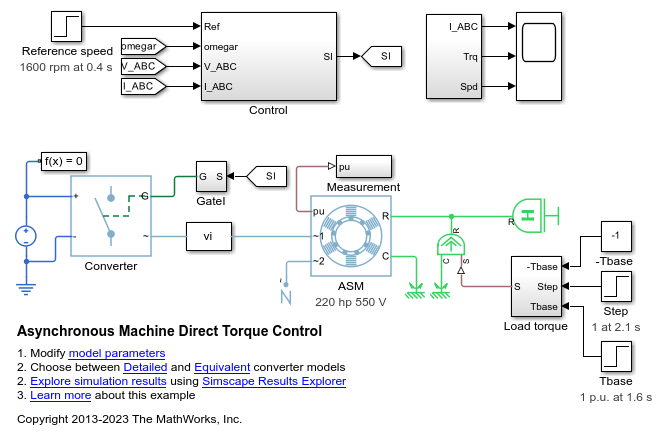
직접 토크 제어 방법으로 유도기 속도 제어하기
이 예제에서는 직접 토크 제어 방법을 사용하여 비동기기(ASM: Asynchronous Machine)를 제어하는 방법을 보여줍니다. PI 기반 속도 제어기는 토크 기준을 제공합니다. 직접 토크 제어기는 인버터 펄스를 생성합니다.

공간 벡터 변조기를 활용한 비동기기 직접 토크 제어
이 예제에서는 공간 벡터 변조기와 함께 직접 토크 제어 방법을 사용하여 비동기기(ASM: Asynchronous Machine)를 제어하는 방법을 보여줍니다. PI 기반 속도 제어기는 토크 기준을 제공합니다. 직접 토크 제어기는 공간 벡터 변조기에 필요한 기준 전압을 생성합니다. DC 전압원이 제어된 평균값 전압원 컨버터를 통해 ASM에 전력을 공급합니다.

비동기기 스칼라 제어
이 예제에서는 스칼라 V/f 제어 방법을 사용하여 비동기기(ASM: Asynchronous Machine) 드라이브에서 회전자 속도를 제어하는 방법을 보여줍니다. 컨버터는 기준 속도를 기준 전기 주파수로 변환합니다. 제어기는 스칼라 V/f 제어를 통해 전압 대 주파수 비를 일정하게 유지하여 기준 주파수에서 기준 전압을 생성합니다.

BLDC 히스테리시스 전류 제어
이 예제에서는 히스테리시스 제어기를 사용하여 BLDC 기반 전기 드라이브의 전류를 제어하는 방법을 보여줍니다. 제어된 3상 인버터를 통해 DC 전압원이 BLDC에 전력을 공급합니다. 모터 제어기는 램프 형태의 전류를 요청 받습니다. 부하 토크는 회전자 속도의 제곱에 비례합니다. Control 서브시스템은 히스테리시스 기반의 전류 제어 전략을 구현합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

BLDC 위치 제어
이 예제에서는 BLDC 기반 전기 드라이브에서 회전자 각도를 제어하는 방법을 보여줍니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 3개의 제어 루프(바깥쪽의 위치 제어 루프, 속도 제어 루프, 안쪽의 전류 제어 루프)가 있는 PI 기반 캐스케이드 제어 구조를 사용합니다. 제어된 3상 인버터를 통해 BLDC에 전력이 공급됩니다. 인버터를 위한 게이트 신호는 홀 신호에서 얻어집니다. 시뮬레이션은 스텝 기준 신호를 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

BLDC 속도 제어
이 예제에서는 BLDC 기반 전기 드라이브에서 회전자 속도를 제어하는 방법을 보여줍니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 바깥쪽 속도 제어 루프와 안쪽 dc 링크 전압 제어 루프가 있는 PI 기반 캐스케이드 제어 구조를 사용합니다. dc 링크 전압은 DC-DC 벅 컨버터를 통해 조정됩니다. 제어된 3상 인버터를 통해 BLDC에 전력이 공급됩니다. 인버터를 위한 게이트 신호는 홀 신호에서 얻어집니다. 시뮬레이션은 속도 스텝을 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

HESM 토크 제어
이 예제에서는 하이브리드 여자 동기기(HESM) 기반 전기-견인 드라이브에서 토크를 제어하는 방법을 보여줍니다. 영구 자석과 여자 권선은 HESM을 여자합니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 4사분면 초퍼(회전자 권선의 경우)를 통해 SM에 전력을 공급합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 전류 기준으로 변환됩니다. 전류 제어는 PI 기반입니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

HESM 속도 제어
이 예제에서는 하이브리드 여자 동기기(HESM) 기반 전기-견인 드라이브에서 각속도를 제어하는 방법을 보여줍니다. 영구 자석과 여자 권선은 HESM을 여자합니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 4사분면 초퍼(회전자 권선의 경우)를 통해 HESM에 전력을 공급합니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. 이 제어 구조는 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 3개로 이루어집니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

IPMSM 토크 제어
이 예제에서는 매립형 IPMSM(영구 자석 동기기) 기반의 자동차 전기-견인 드라이브의 토크를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. IPMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 IPMSM 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 전류 기준으로 변환됩니다. 전류 제어는 PI 기반이며 토크 제어에 사용되는 레이트보다 빠른 샘플 레이트를 사용합니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. 작업 스케줄링은 Stateflow®로 설계되었습니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
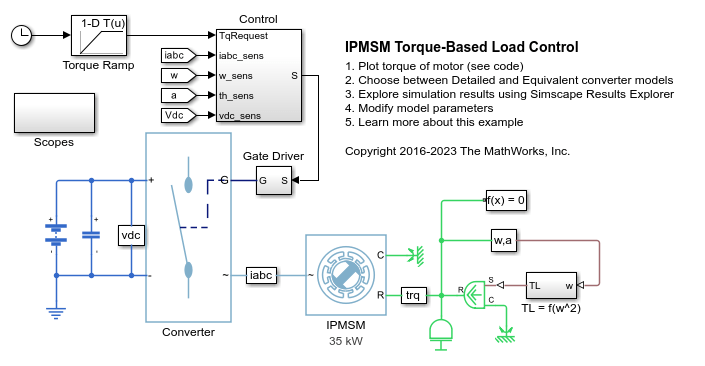
IPMSM 토크 기반 부하 제어
이 예제에서는 매립형 영구자석 동기모터(IPMSM) 기반 드라이브의 토크를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 인버터를 통해 IPMSM에 전력을 공급합니다. 모터 제어기는 램프 형태의 토크를 요청받습니다. 부하 토크는 회전자 속도의 제곱에 비례합니다. Control 서브시스템은 개루프 접근법을 사용하여 IPMSM 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 전류 기준으로 변환됩니다. 전류 제어는 PI 기반이며 토크 제어에 사용되는 레이트보다 빠른 샘플 레이트를 사용합니다. 작업 스케줄링은 Stateflow®로 설계되었습니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

IPMSM 속도 제어
이 예제에서는 매립형 영구 자석 동기기(IPMSM) 기반의 자동차 전기-견인 드라이브의 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. IPMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 토크 소스가 부하를 제공합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 2개를 갖는 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. Control 서브시스템의 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. 1초의 시뮬레이션 중에 각속도 요구량은 0rpm, 500rpm, 2000rpm, 그런 다음 3000rpm입니다.

PMSM 약계자 제어
이 예제에서는 영구 자석 동기기(PMSM) 기반 전기-견인 드라이브에서 공칭 속도를 초과하는 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 PMSM에 전력을 공급합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 2개를 갖는 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. 속도 제어기는 토크 기준을 생성합니다. 제로 d축 제어기는 이 토크 기준을 전류 기준으로 변환합니다. 약계자 제어기는 공칭 속도를 초과하는 전압 제약 조건을 충족하도록 전류 기준을 조정합니다. Stateflow® 상태 머신은 Control 서브시스템에 작업 스케줄링을 구현합니다. 0.7초의 시뮬레이션 중에 각속도 요구량은 0에서 4000rpm으로 상승합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

PMSM 위치 제어
이 예제에서는 PMSM 기반 전기 드라이브의 회전자 위치를 제어하는 방법을 보여줍니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 2개의 제어 루프(위치 및 속도 제어를 위한 바깥쪽 루프와 전류 제어를 위한 안쪽 루프)가 있는 캐스케이드 제어 구조를 사용합니다. 추정기 설계를 위한 상태는 전자기 토크, 기계 각속도, 기계 각위치, 외란(부하 토크)입니다. 최적의 상태-피드백 선형 2차 레귤레이터가 위치와 속도를 제어합니다. Luenberger 관측기는 부하를 추정합니다. PI 제어기는 안쪽 전류 제어 루프를 구현합니다. 제어된 3상 인버터가 PMSM에 전력을 공급합니다. 시뮬레이션은 스텝 기준 신호를 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

SM 토크 제어
이 예제에서는 동기기(SM) 기반 전기-견인 드라이브에서 토크를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 4사분면 초퍼(회전자 권선의 경우)를 통해 SM에 전력을 공급합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 전류 기준으로 변환됩니다. 전류 제어는 PI 기반입니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

SM 속도 제어
이 예제에서는 동기기(SM) 기반 전기-견인 드라이브에서 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 4사분면 초퍼(회전자 권선의 경우)를 통해 SM에 전력을 공급합니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 3개를 갖는 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. Control 서브시스템의 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
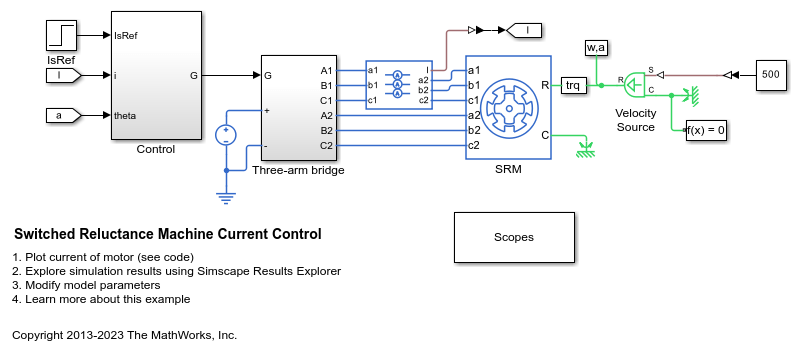
스위치 릴럭턴스 머신 전류 제어
이 예제에서는 스위치 릴럭턴스 머신(SRM) 기반 전기 드라이브에서 전류 진폭을 제어하는 방법을 보여줍니다. DC 전압원이 제어된 3-암 브리지를 통해 SRM에 전력을 공급합니다. 이상적 각속도 소스가 부하를 제공합니다. 컨버터 턴온 각과 컨버터 턴오프 각은 일정하게 유지됩니다. PI 기반 전류 제어기가 전류 진폭을 조정합니다.

스위치 릴럭턴스 머신의 회전자 속도 제어하기
이 예제에서는 SRM(스위치 릴럭턴스 머신) 기반 전기 드라이브의 회전자 속도를 제어하는 방법을 보여줍니다. DC 전압원이 제어된 3-암 브리지를 통해 SRM에 전력을 공급합니다. 정방향 및 역방향 회전을 모두 달성하기 위해 이 예제에서는 속도 오차를 사용하여 컨버터 턴온 및 턴오프 각을 조정합니다.

동기기 상태공간 제어
이 예제에서는 상태공간 제어를 사용하여 동기기(SM) 기반 견인 드라이브에서 전류를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 2사분면 초퍼(회전자 권선의 경우)를 통해 SM에 전력을 공급합니다. 이상적 각속도 소스가 부하를 제공합니다. SM은 베이스 속도 아래에서 작동합니다. 각 샘플 시점에 토크 요청은 제로 d축 제어 접근법을 사용하여 관련된 전류 기준으로 변환됩니다. 상태-피드백 제어기는 회전자 기준 프레임에서 전류를 제어합니다. Luenberger 관측기는 속도 종속 피드포워드 사전 제어 항을 구합니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

동기식 릴럭턴스 머신 토크 제어
이 예제에서는 SynRM(동기식 릴럭턴스 머신) 기반 전기 드라이브의 토크를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 SynRM에 전력을 공급합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 암페어당 최대 토크 전략을 사용하여 관련된 전류 기준으로 변환됩니다. 전류 제어는 PI 기반입니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 토크 스텝을 사용합니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

동기식 릴럭턴스 머신 속도 제어
이 예제에서는 동기식 릴럭턴스 머신(SynRM) 기반 전기 드라이브에서 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 SynRM에 전력을 공급합니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. 이 제어 구조는 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 2개로 이루어집니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

센서 제어가 포함된 3상 비동기 드라이브
이 예제에서는 센서 회전자 자속 기준 제어를 사용하여 ASM(비동기기)의 작동을 제어하고 분석하는 방법을 보여줍니다. 이 모델은 기본 전기 회로를 보여주며, 여기에는 제어, 측정, 스코프를 포함하는 3개의 추가 서브시스템이 있습니다. 제어 서브시스템은 2개의 제어기를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 머신 측 컨버터(DC/AC)를 위한 것입니다. Scopes 서브시스템은 2개의 시간 스코프를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 ASM을 위한 것입니다. 모델이 실행될 때 스펙트럼 분석기가 열려 A상 공급 전류에 대한 주파수 데이터가 표시됩니다.

센서리스 제어가 포함된 3상 비동기 드라이브
이 예제에서는 센서리스 회전자 자속 기준 제어를 사용하여 비동기기(ASM)의 작동을 제어하고 분석하는 방법을 보여줍니다. 이 모델은 기본 전기 회로를 보여주며, 여기에는 제어, 측정, 스코프를 포함하는 3개의 추가 서브시스템이 있습니다. 제어 서브시스템은 2개의 제어기를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 머신 측 컨버터(DC/AC)를 위한 것입니다. Scopes 서브시스템은 2개의 시간 스코프를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 ASM을 위한 것입니다. 모델이 실행될 때 스펙트럼 분석기가 열려 A상 공급 전류에 대한 주파수 데이터가 표시됩니다.

3상 PMSM 드라이브 모델링하기
이 예제에서는 와이 권선 및 델타 권선 구성의 PMSM(영구 자석 동기기)과 일반적인 하이브리드 차량에 사용할 수 있는 크기의 인버터를 보여줍니다. 인버터는 차량 배터리에 직접 연결되지만 그 사이에 DC-DC 컨버터 단계를 구현할 수도 있습니다. 이 모델에서는 원하는 성능을 얻을 수 있는 아키텍처와 이득을 선택하여 PMSM 제어기를 설계할 수 있습니다. IGBT 턴온과 IGBT 턴오프의 타이밍을 확인하려면 IGBT 소자를 보다 상세한 N-Channel IGBT 블록으로 대체하십시오. 완전한 차량 모델링을 위해 Motor & Drive(System Level) 블록을 사용하여 에너지 기반 모델로 PMSM, 인버터, 제어기를 추상화하십시오.
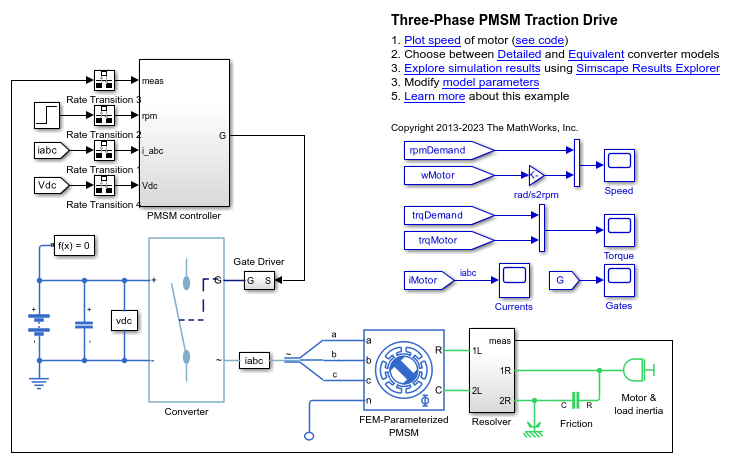
3상 PMSM 견인 드라이브
이 예제에서는 PMSM(영구 자석 동기기) 기반 전기-견인 드라이브의 회전자 속도를 제어하는 방법을 보여줍니다. 고전압 배터리가, 제어된 3상 컨버터를 통해 FEM-Parameterized PMSM 블록에 전력을 공급합니다. Rotational Friction 블록이 부하를 제공합니다. 위치 정보와 속도 정보는 고충실도 리졸버를 사용하여 얻어집니다. PMSM Controller 서브시스템은 1개의 바깥쪽 속도 제어 루프와 2개의 안쪽 전류 제어 루프를 갖는 캐스케이드 제어 구조를 포함합니다. 0.25초의 시뮬레이션 중에 회전자 속도 요구량은 0에서 1000rpm으로 상승합니다.

3상 동기기 제어
이 예제에서는 동기기(SM: Synchronous Machine)를 제어하고 초기화하는 방법을 보여줍니다. 테스트 회로는 발전기로 동작하는 SM을 보여줍니다. 단자 전압은 AVR을 사용하여 제어되고 속도는 거버너를 사용하여 제어됩니다.

3상 동기기 드라이브
이 예제에서는 동기기(SM: Synchronous Machine) 기반 전기 드라이브에서 회전자 속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 2사분면 초퍼(회전자 권선의 경우)를 통해 SM에 전력을 공급합니다. 이 모델은 원하는 성능을 얻을 수 있는 아키텍처와 이득을 선택하여 SM 제어기를 설계하는 데 사용할 수 있습니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
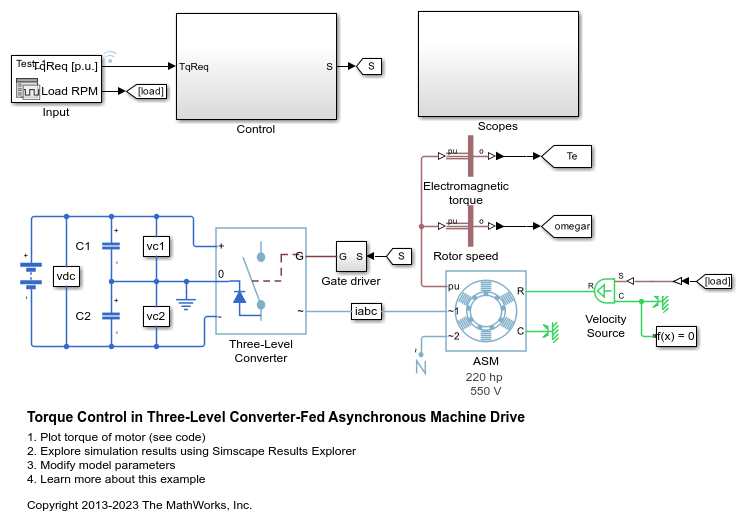
3레벨 컨버터 구동 비동기기 드라이브의 토크 제어
이 예제에서는 ASM(비동기기) 기반 전기-견인 드라이브에서 토크를 제어하는 방법을 보여줍니다. 고전압 배터리가 3상 3레벨 중성점 클램프 컨버터를 통해 ASM에 전력을 공급합니다. ASM은 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 자속 기준 제어 전략을 사용하여 플럭스와 토크를 제어합니다. 전류 제어는 PI 기반입니다. 비례 제어기는 중성점 전압을 조절합니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

단상 비동기기 직접 토크 제어
이 예제에서는 직접 토크 제어를 사용하여 ASM(단상 비동기기) 기반 전기 드라이브에서 회전자 속도를 제어하는 방법을 보여줍니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 캐스케이드 제어 구조를 사용합니다. 외부 PI 기반 속도 제어 루프는 내부 루프에서 직접 토크 제어 알고리즘에 토크 기준과 플럭스 기준을 제공합니다. H 브리지를 통해 단상 ASM에 전력이 공급됩니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

단상 비동기기 자속 기준 제어
이 예제에서는 자속 기준 제어를 사용하여 단상 비동기기(ASM) 기반 전기 드라이브에서 회전자 속도를 제어하는 방법을 보여줍니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 바깥쪽의 속도 제어 루프 1개와 안쪽의 전류 제어 루프 2개가 있는 PI 기반 캐스케이드 제어 구조를 사용합니다. H 브리지를 통해 단상 ASM에 전력이 공급됩니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

5상 스위치 릴럭턴스 머신 제어
이 예제에서는 5상 스위치 릴럭턴스 머신(SRM) 기반 전기 드라이브의 회전자 속도를 제어하는 방법을 보여줍니다. DC 전압원이 제어된 5-암 브리지를 통해 SRM에 전력을 공급합니다. 컨버터 턴온 각과 컨버터 턴오프 각은 일정하게 유지됩니다.

4상 스위치 릴럭턴스 머신 제어
이 예제에서는 4상 스위치 릴럭턴스 머신(SRM) 기반 전기 드라이브의 회전자 속도를 제어하는 방법을 보여줍니다. DC 전압원이 제어된 4-암 브리지를 통해 SRM에 전력을 공급합니다. 컨버터 턴온 각과 컨버터 턴오프 각은 일정하게 유지됩니다.

3상 비동기기 시동
이 예제에서는 유도기의 와이-델타 시동 회로를 모델링하는 방법을 보여줍니다. 1초 후 Controller 서브시스템이 S1로 레이블이 지정된 스위치를 닫습니다. 이 스위치를 닫으면 공급장치가 머신에 연결됩니다. 처음에는 머신이 와이 구성으로 공급장치에 연결되는데, S2로 레이블이 지정된 스위치가 ~1 포트의 각 상을 ~2 포트의 대응되는 상에 연결하고 ~3 포트는 연결 해제된 상태로 두기 때문입니다. 머신이 동기 속도의 80%에 도달하면 S2가 ~2의 각 상을 연결 해제하고 ~1의 각 상을 ~3의 대응되는 상에 연결하여 머신을 델타 구성으로 다시 연결합니다. 그러면 모터가 회전자 속도에 관계없이 델타 구성에서 동작합니다. 모터가 와이 구성일 때 공급장치 측에서 볼 때의 임피던스가 더 높아져 시동 전류가 감소하고 연결된 다른 부하에 대한 교란이 줄어들게 됩니다.

HEV PMSM 드라이브 테스트 하네스
이 예제에서는 일반적인 하이브리드 차량에 사용할 수 있는 크기의 영구 자석 동기 모터(PMSM) 드라이브에 대한 테스트 하네스를 보여줍니다. 테스트 하네스는 주어진 속도와 토크로 동작 시 전반적인 드라이브 손실을 확인하는 데 사용할 수 있습니다. 이 테스트 하네스를 통해 얻은 테이블 형식의 손실 정보는 전체 드라이브 사이클의 신속한 시뮬레이션과 전반적인 시스템 효율의 정확한 예측을 위해 Simscape™ Electrical™ Motor & Drive(System Level) 블록에서 사용할 수 있습니다.

BLDC의 성능 곡선 계산
이 예제에서는 BLDC(브러시리스 DC) 모터에 대한 성능 곡선을 계산하는 방법을 보여줍니다. 시뮬레이션은 속도 램프를 포함합니다. 이상적 사다리꼴 변조파는 평균값 컨버터를 구동하는 데 사용됩니다. Triggered Subsystem은 주어진 속도에 대한 피크 토크, 전력, 전류, 효율 값을 결정하는 데 사용됩니다.
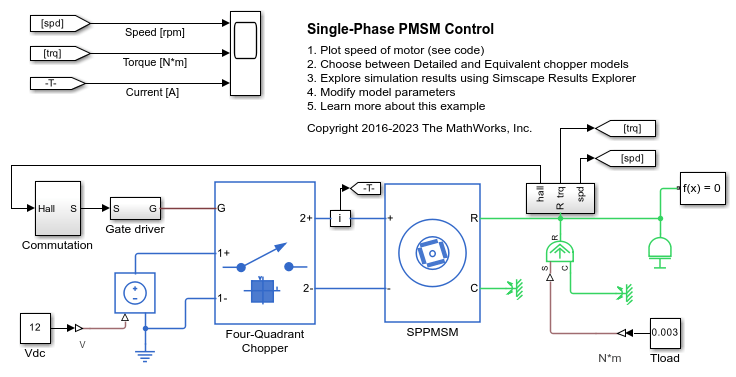
단상 PMSM 제어
이 예제에서는 SPPMSM(단상 영구 자석 동기 모터) 드라이브의 회전자 속도를 제어하는 방법을 보여줍니다. DC 전압원이 제어된 H-Bridge를 통해 SPPMSM에 전력을 공급합니다. Control 서브시스템이 속도 제어 전략을 구현합니다.
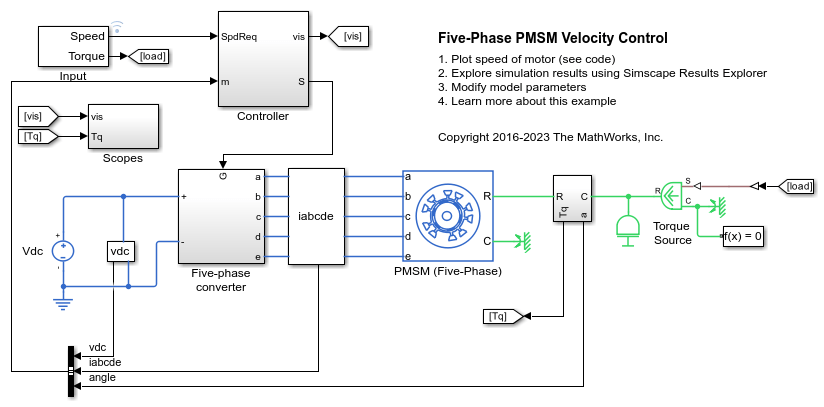
5상 PMSM 속도 제어
이 예제에서는 5상 영구 자석 동기기(PMSM) 기반 전기-견인 드라이브의 회전자 각속도를 제어하는 방법을 보여줍니다. DC 전압원이 제어된 5상 컨버터를 통해 PMSM에 전력을 공급합니다. PMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 토크 소스가 부하를 제공합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 4개를 갖는 PI 기반 캐스케이드 제어 구조를 포함합니다. 1초의 시뮬레이션 중에 각속도 요구량은 0rpm, 500rpm, 2000rpm, 그런 다음 3000rpm입니다.

5상 PMSM 토크 제어
이 예제에서는 5상 영구 자석 동기기(PMSM) 기반 전기-견인 드라이브의 토크를 제어하는 방법을 보여줍니다. DC 전압원이 제어된 5상 컨버터를 통해 PMSM에 전력을 공급합니다. PMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 PMSM 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 q축 전류 기준으로 변환됩니다. 전류 제어는 PI 기반입니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

3상 PMLSM 드라이브
이 예제에서는 3상 영구 자석 선형 동기기(PMLSM) 드라이브에서의 위치 제어 방법을 보여줍니다. Control 서브시스템은 바깥쪽의 위치 제어 루프, 속도 제어 루프, 안쪽의 전류 제어 루프 2개가 있는 PI 기반 캐스케이드 제어 구조를 사용합니다. 제어된 3상 컨버터가 PMLSM에 전력을 공급합니다. 시뮬레이션은 스텝 기준 신호를 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
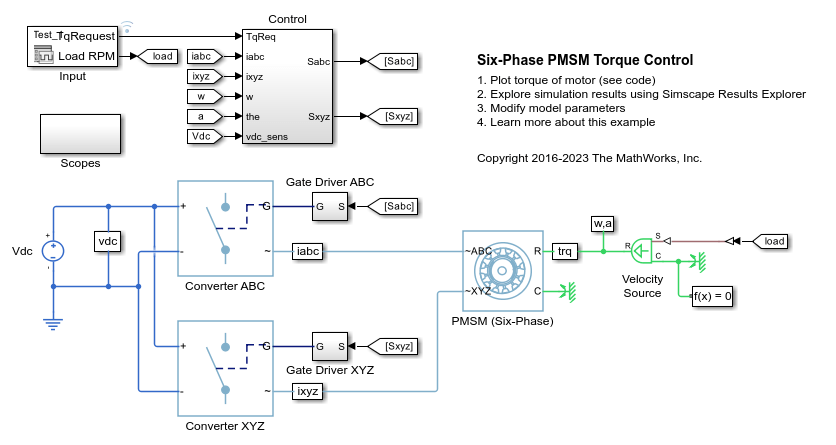
6상 PMSM 토크 제어
이 예제에서는 6상 영구 자석 동기기(PMSM) 기반 전기-견인 드라이브에서 토크를 제어하는 방법을 보여줍니다. DC 전압원이 2개의 제어된 3상 컨버터를 통해 PMSM에 전력을 공급합니다. PMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 q축 전류 기준으로 변환됩니다. 전류 제어는 PI 기반입니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
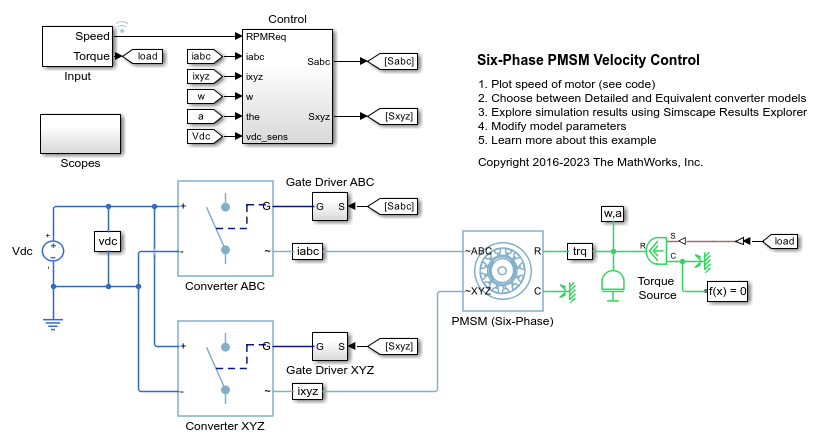
6상 PMSM 속도 제어
이 예제에서는 6상 영구 자석 동기기(PMSM) 기반 전기-견인 드라이브의 회전자 각속도를 제어하는 방법을 보여줍니다. DC 전압원이 2개의 제어된 3상 컨버터를 통해 PMSM에 전력을 공급합니다. PMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 토크 소스가 부하를 제공합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 4개를 갖는 PI 기반 캐스케이드 제어 구조를 포함합니다. 1초의 시뮬레이션 중에 각속도 요구량은 0rpm, 500rpm, 2000rpm, 그런 다음 3000rpm입니다.

열 모델이 포함된 BLDC 위치 제어
이 예제에서는 BLDC 기반 전기 드라이브에서 회전자 각도를 제어하는 방법을 보여줍니다. BLDC는 열 모델과 경험적 철손을 포함하고 있습니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 3개의 제어 루프(바깥쪽의 위치 제어 루프, 속도 제어 루프, 안쪽의 전류 제어 루프)가 있는 PI 기반 캐스케이드 제어 구조를 사용합니다. 제어된 3상 인버터를 통해 BLDC에 전력이 공급됩니다. 인버터를 위한 게이트 신호는 홀 신호에서 얻어집니다. 시뮬레이션은 스텝 기준 신호를 사용합니다. 고정자 권선과 회전자의 초기 온도는 섭씨 25도로 설정됩니다. 주변 온도는 섭씨 27도입니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

열 모델에서의 3상 PMSM 드라이브
이 예제에서는 영구 자석 동기기(PMSM)와 일반적인 하이브리드 차량에 사용할 수 있는 크기의 인버터를 보여줍니다. PMSM은 열 모델과 경험적 철손을 포함하고 있습니다. 인버터는 차량 배터리에 직접 연결되지만 그 사이에 DC-DC 컨버터 단계를 구현할 수도 있습니다. 이 모델은 원하는 성능을 얻을 수 있는 아키텍처와 이득을 선택하여 PMSM 제어기를 설계하는 데 사용할 수 있습니다. 고정자 권선과 회전자의 초기 온도는 섭씨 25도로 설정됩니다. 주변 온도는 섭씨 27도입니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
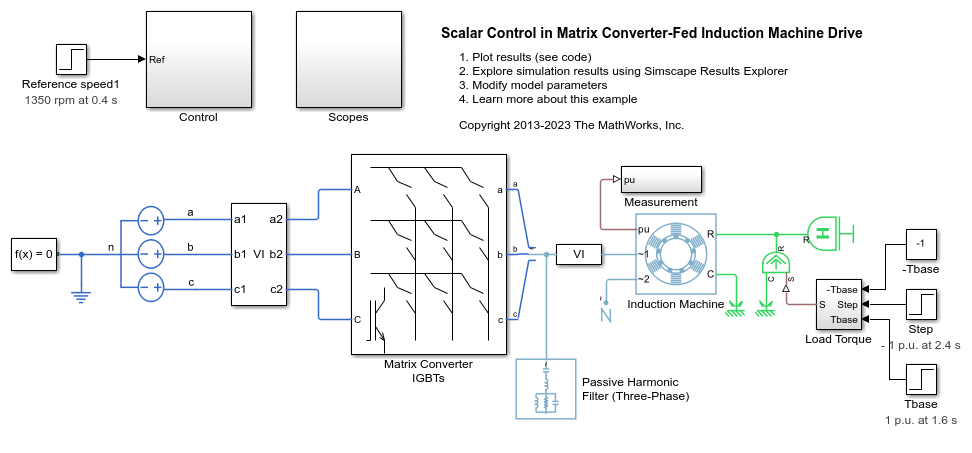
Scalar Control in Matrix Converter-Fed Induction Machine Drive
Control the rotor speed in a matrix converter-fed induction machine drive by using the scalar V/f control method. To generate three-phase voltage with reference frequency, the controller maintains a constant voltage-to frequency ratio though scalar V/f control. A three-phase voltage source with fixed amplitude and frequency feeds the induction machine through a three-phase matrix converter. The matric converter is controlled using third harmonic injection Venturini modulation with unity input displacement factor. The induction machine operates in both motoring and generating modes. The Scopes subsystem contains scopes that allow you to see the simulation results.

결함이 있는 PMSM 모델링하기
이 예제에서는 Simscape™ Electrical™을 사용하여 결함이 있는 PMSM(영구 자석 동기 모터)을 모델링하는 방법을 보여줍니다. 일반적으로 PMSM을 모델링할 때는 각 권선을 인덕턴스, 유도된 역기전력(EMF), 인접 권선과의 상호 인덕턴스 결합이 포함된 단일 개체로 나타낼 수 있습니다. 그러나 권선 결함이 발생하면 이 단일 개체 가정이 무너지게 됩니다. 결과적인 동특성을 정확하게 파악하려면 권선 슬롯 수준에서 모터를 모델링해야 합니다. 그러려면 자기 도메인에서 모델링을 해야 합니다.

4상 PMSM 토크 제어
이 예제에서는 4상 영구 자석 동기기(PMSM) 기반 전기-견인 드라이브에서 토크를 제어하는 방법을 보여줍니다. DC 전압원이 제어된 4상 컨버터를 통해 PMSM에 전력을 공급합니다. PMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 PMSM 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 q축 전류 기준으로 변환됩니다. 전류 제어는 PI 기반입니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
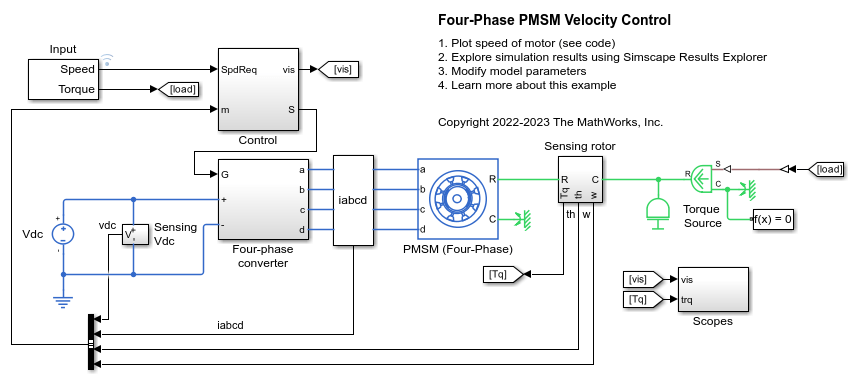
4상 PMSM 속도 제어
이 예제에서는 4상 PMSM(영구 자석 동기기) 기반 전기-견인 드라이브의 회전자 각속도를 제어하는 방법을 보여줍니다. DC 전압원이 제어된 4상 컨버터를 통해 PMSM에 전력을 공급합니다. PMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 토크 소스가 부하를 제공합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 4개를 갖는 PI 기반 캐스케이드 제어 구조를 포함합니다. 1초의 시뮬레이션 중에 각속도 요구량은 0rpm, 500rpm, 2000rpm, 그런 다음 3000rpm입니다.

6상 스위치 릴럭턴스 머신 제어
이 예제에서는 6상 스위치 릴럭턴스 머신(SRM) 기반 전기 드라이브에서 회전자 속도를 제어하는 방법을 보여줍니다. DC 전압원이 제어된 6-암 브리지를 통해 SRM에 전력을 공급합니다. 컨버터 턴온 각과 컨버터 턴오프 각은 일정합니다.

외부 여자 동기 모터 자속 기준 제어
이 예제에서는 자속 기준 제어를 사용하여 외부 여자 SM(동기 모터) 드라이브에서 토크를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 2사분면 초퍼(회전자 권선의 경우)를 통해 SM에 전력을 공급합니다. 빠른 시뮬레이션을 위해 두 컨버터 모두 평균 스위치와 변조 파형을 사용하여 제어됩니다. 이 구현을 통해 PWM 제어 신호로 쉽게 전환할 수 있습니다. d축, q축, 여자의 전류 기준은 오프라인으로 생성되며 3차원 룩업 테이블을 사용하여 구현됩니다. 이 모델을 사용하여 SM 제어 알고리즘을 실시간으로 설계하고 평가할 수 있습니다. 임베디드 마이크로컨트롤러에 제어기를 배포하려면 Motor Control Blockset™ 라이브러리의 최적화된 제어기를 사용합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

시스템 수준 AC 드라이브
이 예제에서는 AC-DC Converter(Three-Phase) 블록과 Motor & Drive(System Level) 블록을 사용하여 전기 기기에 대한 시스템 수준 AC 드라이브를 모델링하는 방법을 보여줍니다. AC-DC 컨버터는 일정한 DC 링크 전압을 제공하는 그리드 측 컨버터를 나타냅니다. Motor & Drive 블록은 DC-AC 컨버터가 탑재된 일반 AC 전기 기기 역할을 합니다. 이 모델링 접근법은 전력 컨버터의 스위칭 이벤트 없이 신속한 시스템 수준 시뮬레이션을 제공합니다.
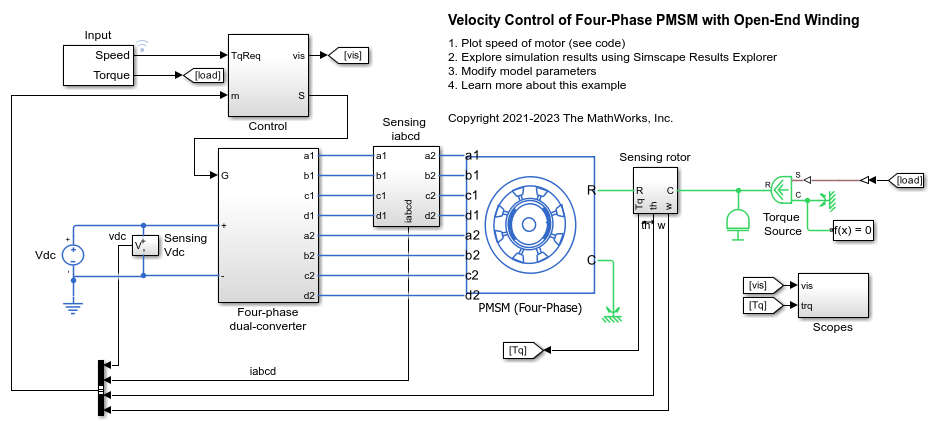
개방 권선이 있는 4상 PMSM의 속도 제어
이 예제에서는 개방 권선이 있는 4상 PMSM(영구 자석 동기기)을 사용하는 전기-견인 드라이브의 회전자 각속도를 제어하는 방법을 보여줍니다. Open-End PMSM (Four-Phase) 블록의 소스 코드를 보려면 블록을 더블 클릭한 다음 설명 탭에서 '소스 코드' 하이퍼링크를 클릭합니다. DC 전압원이 2개의 제어된 4상 컨버터를 통해 PMSM에 전력을 공급합니다. PMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 토크 소스가 부하를 제공합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 4개를 갖는 PI 기반 캐스케이드 제어 구조를 포함합니다. 1초의 시뮬레이션 중에 각속도 요구량은 0rpm, 500rpm, 2000rpm, 그런 다음 3000rpm입니다.

Model Start-Up Control Strategy for Wound-Rotor Induction Motor
Design a start-up control strategy with a resistor for a wound-rotor induction model using a Simscape™ Electrical™ FEM-Parameterized Induction Machine (Wound Rotor) block.
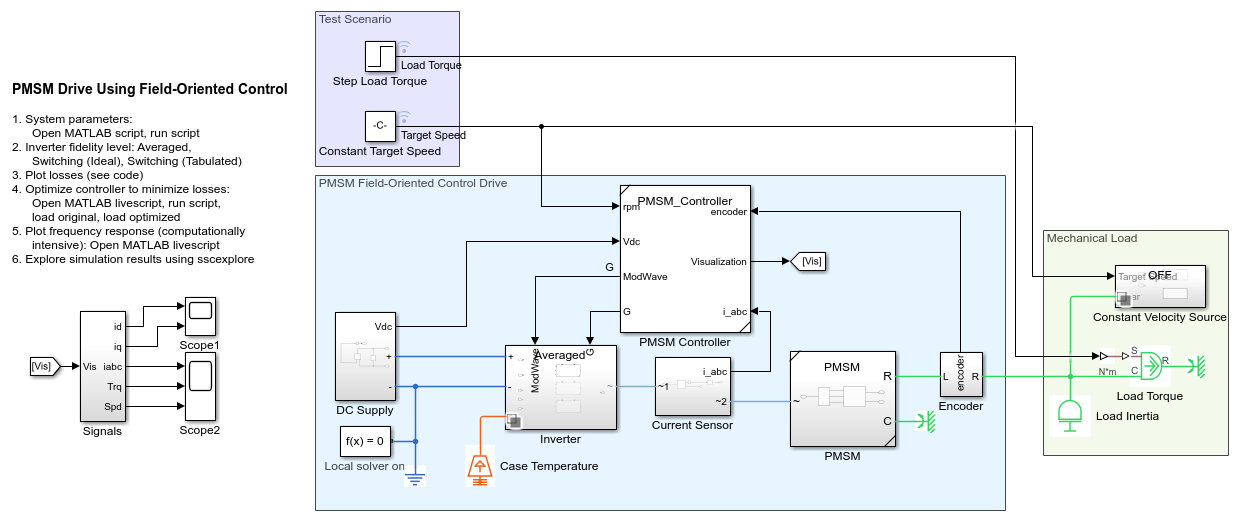
Improve Motor Efficiency with Optimized Control Parameters
Improve the efficiency of a permanent magnet synchronous motor (PMSM) drive using an optimal field-oriented controller (FOC). The FOC has been designed to minimize the motor losses. You can download this model in MATLAB® or access it from MATLAB Central File Exchange and GitHub®.