IPMSM 토크 기반 부하 제어
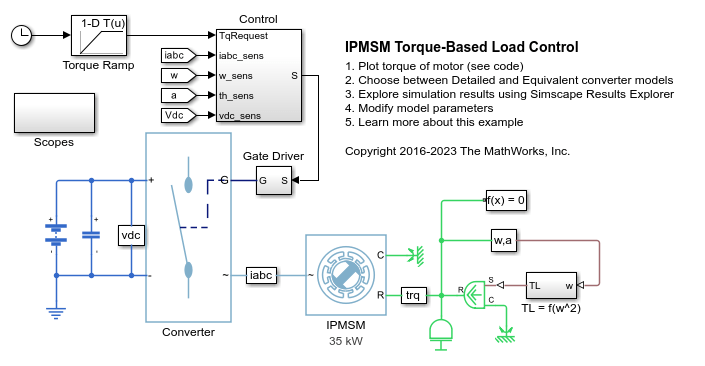
이 예제에서는 매립형 영구자석 동기모터(IPMSM) 기반 드라이브의 토크를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 인버터를 통해 IPMSM에 전력을 공급합니다. 모터 제어기는 램프 형태의 토크를 요청받습니다. 부하 토크는 회전자 속도의 제곱에 비례합니다. Control 서브시스템은 개루프 접근법을 사용하여 IPMSM 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 전류 기준으로 변환됩니다. 전류 제어는 PI 기반이며 토크 제어에 사용되는 레이트보다 빠른 샘플 레이트를 사용합니다. 작업 스케줄링은 Stateflow®로 설계되었습니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
모델
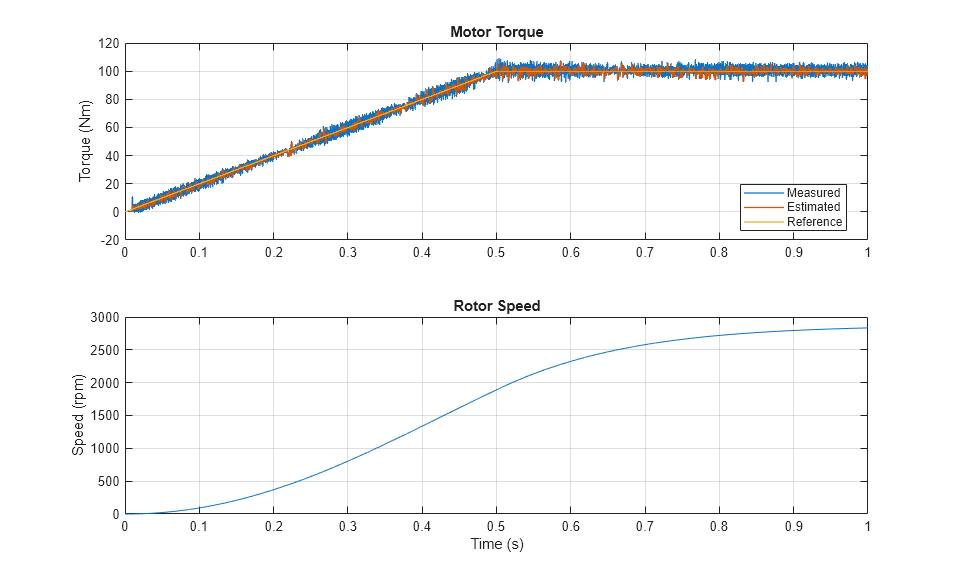
Simscape 기록의 시뮬레이션 결과
아래 플롯은 테스트에서 요청된 토크와 그 측정값을 전기 드라이브의 회전자 속도와 함께 보여줍니다.
참고 항목
PMSM | Converter (Three-Phase)