벡터 제어
FOC(자속 기준 제어)는 PMSM(영구 자석 동기 모터)과 유도 모터 모두에서 고성능 동적 성능을 구현하는 데 도움을 줍니다. FOC의 기본 원리는 고정자 전류 벡터를 두 개의 직교 성분으로 분리하는 것으로, 하나는 자속을, 다른 하나는 토크 생성을 담당합니다. 이러한 분리 과정은 Clarke 변환과 Park 변환으로 알려진 수학적 추상화를 통해 용이하게 이루어집니다. 먼저, Clarke 변환은 3상 정지 전류 신호를 2상 정지 알파-베타 좌표계로 변환합니다. 그 후, Park 변환은 이러한 고정 벡터들을 회전자의 자기장과 일치하도록 회전하는 동기 d-q 좌표계로 변환합니다. FOC는 복잡한 교류 파형을 직류와 유사한 형태로 변환함으로써 토크와 자속을 독립적이고 정밀하게 제어할 수 있게 해줍니다.
Motor Control Blockset를 사용하여 생성한 Simulink 모델은 전력 인버터, 모터의 수학적 표현, 그리고 중첩된 PI(비례-적분) 제어 루프로 구성된 FOC 알고리즘을 통합하는 데 사용할 수 있습니다. 기계 블록 파라미터와 각 모터 유형에 필요한 특정 자속 추정 로직을 조정하여 PMSM과 유도 모터 모두에 대해 FOC를 시뮬레이션할 수 있습니다.
Motor Control Blockset는 또한 모터의 자속과 토크를 직접 제어하여 모터 속도 제어를 구현하는 벡터 모터 제어 기술인 DTC(직접 토크 제어)를 지원합니다. d- 및 q-축의 모터 전류를 제어하는 FOC(자속 기준 제어)와 달리, DTC 알고리즘은 모터의 위치와 전류를 바탕으로 토크와 플럭스 값을 추정합니다. 그런 다음 PI 제어기를 사용해 모터 토크와 플럭스를 제어하여 최종적으로 모터를 구동하는 최적 전압을 생성합니다.
참고
여기에 나열된 블록은 MISRA C™ 지침을 준수합니다.
함수
mcb.PMSMCharacteristics | Compute and plot PMSM drive characteristics and constraint curves (R2022b 이후) |
mcb.ACIMCharacteristics | Compute and plot ACIM characteristic curves (R2022a 이후) |
mcb.getPIControllerParameters | Compute gains for PI controller in field-oriented control |
mcb.calcFOCGains | Compute gains and transfer functions for PI controller in field-oriented control of PMSM (R2025a 이후) |
mcb.getMotorControlAnalysis | Frequency-domain analysis plots for PI controller of field-oriented control |
블록
도움말 항목
- 자속 기준 제어(FOC)
자속 기준 제어를 사용하여 PMSM 및 유도 모터의 속도 제어를 구현합니다.
- 자속 기준 제어 알고리즘 설계하기
토크 제어 서브시스템과 속도 제어 서브시스템을 설계하고 통합합니다.
- 단계 1: 전류 스케일링 서브시스템과 위치 스케일링 서브시스템 설계하기
- 단계 2: 전류 제어기 서브시스템 설계하기
- 단계 3: 전류 제어기의 이득을 수동으로 조정하기
- 단계 4: 속도 제어 알고리즘 설계하기
- 단계 5: 속도 제어기의 이득을 수동으로 조정하기
- Field-Weakening Control
Implement control for speeds above base speed for PMSM and induction motor by using field-weakening control.
- PIL 테스트를 사용한 코드 검증 및 프로파일링
이 예제에서는 Texas Instruments® LAUNCHXL-F28379D 하드웨어 보드의 PIL 프로파일링을 설명합니다.
- How to Use Single Shunt FOC Library Blocks
This example shows how to use the Simulink blocks for single shunt FOC available with Motor Control Blockset™.
- 직접 토크 제어(DTC)
모터 플럭스와 모터 토크를 제어하여 PMSM의 속도 제어를 구현합니다.
추천 예제

SI 단위를 사용한 PMSM의 자속 기준 제어
이 예제에서는 3상 영구 자석 동기 모터(PMSM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. 그리고 이 예제의 FOC 알고리즘은 수량에 대한 per-unit 표현 대신(per-unit 시스템에 대한 자세한 내용은 Per-Unit System 항목 참조) 신호에 대한 SI 단위를 사용하여 계산을 수행합니다. 다음은 신호와 해당하는 SI 단위입니다.

Control PMSM Loaded with Dual Motor (Dyno)
Uses field-oriented control (FOC) to control two three-phase permanent magnet synchronous motors (PMSM) coupled in a dyno setup. Motor 1 runs in the closed-loop speed control mode. Motor 2 runs in the torque control mode and loads Motor 1 because they are mechanically coupled. You can use this example to test a motor in different load conditions.

Model Switching Dynamics in Inverter Using Simscape Electrical
Uses field-oriented control (FOC) to control the speed of a three-phase permanent magnet synchronous motor (PMSM). It gives you the option to use these Simscape™ Electrical™ blocks as an alternative to the Average Value Inverter block in Motor Control Blockset™:

속도 센서를 사용한 유도 모터의 자속 기준 제어
이 예제에서는 3상 AC 유도 모터(ACIM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC 알고리즘에는 회전자 속도 피드백이 필요하며, 이 예제에서는 쿼드라쳐 인코더 센서를 사용하여 이 피드백을 구합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.

Field-Oriented Control (FOC) of PMSM Using Hardware-in-the-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the field-oriented control (FOC) algorithm to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For more information on FOC, see 자속 기준 제어(FOC).
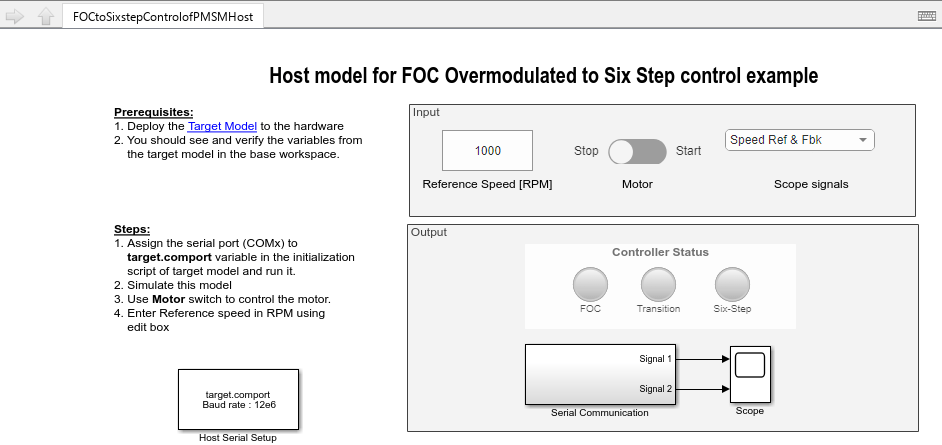
Field-oriented Control of PMSM with Six-Step Transition
Implement dynamic overmodulation to control a surface-mount permanent magnet synchronous motor (SPMSM) using field-oriented control (FOC). When the motor needs to reach higher speeds or produce more torque, the control method seamlessly transitions to six-step control. This allows the motor application to achieve better range without increasing the DC bus voltage of the inverter.
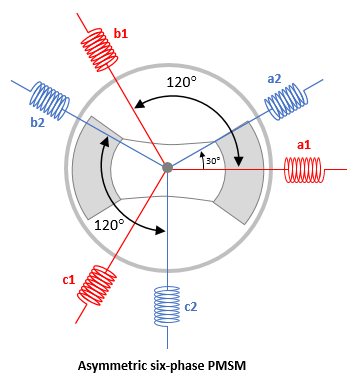
Field-Oriented Control of Six-Phase PMSM
Control the torque of an asymmetric six-phase permanent magnet synchronous motor (PMSM) using field-oriented control (FOC).
Control PMSM Loaded with Dual Motor (Dyno)
Uses field-oriented control (FOC) to control two three-phase permanent magnet synchronous motors (PMSM) coupled in a dyno setup. Motor 1 runs in the closed-loop speed control mode. Motor 2 runs in the torque control mode and loads Motor 1 because they are mechanically coupled. You can use this example to test a motor in different load conditions.

FOC of PMSM Using FPGA-Based Motor Control Development Kit
Use a Field-Oriented Control (FOC) algorithm for a Permanent Magnet Synchronous Motor (PMSM) by using blocks from the Motor Control Blockset™ on an FPGA device (Trenz Electronic™ Motor Control Development Kit TE0820).

PMSM의 약계자 제어(MTPA 사용)
이 예제에서는 3상 영구 자석 동기 모터(PMSM)의 토크 및 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC 알고리즘에는 회전자 위치 피드백이 필요하며, 쿼드라쳐 인코더 센서를 통해 이 피드백을 구합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.

Direct Torque Control of PMSM Using Quadrature Encoder or Sensorless Flux Observer
Implements direct torque control (DTC) technique to control the speed of a three-phase permanent magnet synchronous motor (PMSM). Direct Torque Control (DTC) is a vector motor control technique that implements motor speed control by directly controlling the flux and torque of the motor. The example algorithm needs motor currents and position feedback from PMSM. It uses space vector pulse-width modulation (DTC-SVPWM) variant of DTC, which uses space vector modulation (SVM) to produce the pulse-width modulation (PWM) duty cycles that are used by the inverter. For more details about the DTC-SVPWM algorithm used in this example, see 직접 토크 제어(DTC).