SynRM FeedForward Control
Libraries:
Motor Control Blockset /
Controls /
Control Reference
Description
The SynRM FeedForward Control block decouples d-axis and q-axis current controls and generates the corresponding feedforward voltage gains to enable field-oriented control of a synchronous reluctance motor (SynRM) and permanent magnet-assisted synchronous reluctance motor (PMaSynRM).
You can input feedback values of d-axis and q-axis currents and the mechanical speed of the rotor.
The block generates feedforward gains from the specified motor parameters using one of these methods:
Linear model with lumped parameters— Lumped parameters with d-axis and q-axis stator winding inductances and permanent magnet flux linkage.Non-linear model with D,Q-flux linkage LUTs— Nonlinear model with d-axis and q-axis flux linkage lookup tables.Non-linear model with Ld and Lq LUTs— Nonlinear model with d-axis and q-axis stator winding inductance lookup tables.Non-linear model with Ld, Lq, and FluxPM LUTs— Nonlinear model with d-axis and q-axis stator winding inductances and permanent magnet flux linkage lookup tables.Input port based Ld and Lq— d-axis and q-axis stator winding inductance values provided using separate input ports.Input port based Ld, Lq, and FluxPM— d-axis and q-axis stator winding inductances and permanent magnet flux linkage values provided using separate input ports.
In addition, you can use the Vsat input method parameter to configure the block to accept a fixed saturation voltage through the Output saturation (V) parameter or a variable saturation voltage through a separate input port Vsat .
Equations
If you select Per-Unit (PU) in the Input
units parameter, the block scales down the internal parameters to match
the per-unit scale by default. You can also configure the block to convert the inputs to
SI units before performing any computation and convert them back to per-unit values
after calculating the output by using the Allow scaled-down motor parameters
with CodeGen (higher precision with Fixed-Point data type)
parameter.
These equations describe how the block computes feedforward gain.
Note
The following equations for SynRM and PMaSynRM follow a d-q axis notation that is identical to that of a permanent magnet synchronous motor (PMSM).
For both SynRM and PMaSynRM:
For SynRM:
For PMSynRM:
where:
is the number of pole pairs available in the motor.
is the electrical speed corresponding to frequency of stator voltages (rad/s).
and are the d-axis and q-axis stator winding inductances (henries).
and are the d-axis and q-axis currents (amperes).
ψd and ψq are the magnetic fluxes along the d- and q-axes (weber).
ψm is the permanent magnet flux linkage (weber).
For a detailed set of equations and assumptions that Motor Control Blockset™ uses for a synchronous reluctance machine, see Synchronous Reluctance Machine (Simscape Electrical).
Examples
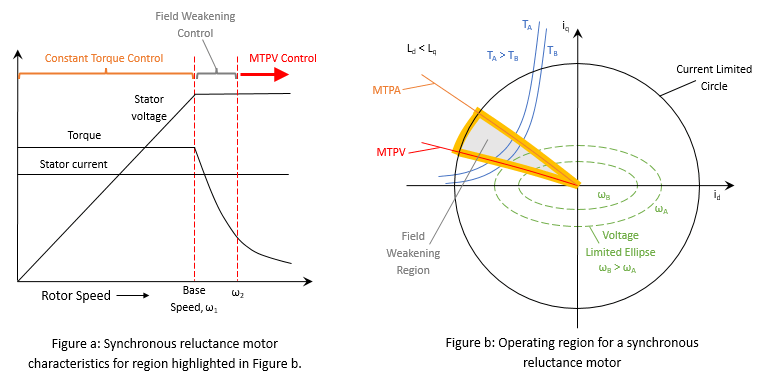
SynRM Constraint Curves and Their Application
Uses Motor Control Blockset™ to utilize the motor constraint curves to determine the operating currents and use lookup tables of these currents in simulation or deployment environments. The example uses the PMSM constraint curves described in the PMSM Drive Characteristics and Constraint Curves page.
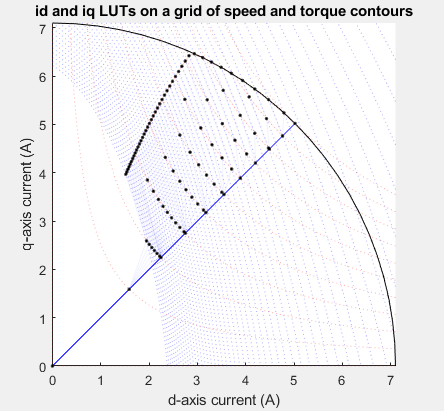
Field-Weakening Control (with MTPA) of Nonlinear Synchronous Reluctance Motors Using Lookup Table
Uses a lookup table (LUT) for a nonlinear synchronous reluctance motor and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity synchronous reluctance motor in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2024a