Sliding Mode Observer
라이브러리:
Motor Control Blockset /
Sensorless Estimators
설명
Sliding Mode Observer 블록은 고정자 αβ 기준 프레임의 α축과 β축을 따르는 전압 값과 전류 값을 사용하여 Surface Mount PMSM의 전기적 위치와 기계적 속도를 계산합니다.
방정식
다음 방정식은 PMSM의 이산시간 연산을 설명합니다.
다음 방정식은 표면부착형 PMSM의 이산시간 슬라이딩 모드 관측기 작동을 설명합니다.
역기전력 관측기가 조건 및 을 충족할 경우, 다음을 충족하는 k0이 존재합니다.
슬라이딩 모드 관측기가 다음 조건을 충족할 경우
k=k0이 존재하며, k≥k0인 경우 다음이 성립합니다.
여기서
eα 및 iα는 α축의 고정자 역기전력 및 전류입니다.
eβ 및 iβ는 β축의 고정자 역기전력 및 전류입니다.
ẽα 및 ĩα는 α축의 고정자 역기전력 및 전류의 오차입니다.
ẽβ 및 ĩβ는 β축의 고정자 역기전력 및 전류의 오차입니다.
vα 및 vβ는 고정자 공급 전압입니다.
R은 고정자 저항입니다.
L은 고정자 인덕턴스입니다.
g는 역기전력 관측기 이득입니다.
η는 전류 관측기 이득입니다.
ωe는 전기 각속도입니다.
Ts는 샘플링 주기입니다.
k는 샘플 개수입니다.
슬라이딩 모드 관측기 조정
전류 관측기 이득(η) 및 역기전력 관측기 이득(g) 파라미터를 사용하여 블록을 조정하려면 다음 단계를 수행하십시오.
을 충족하는 역기전력 관측기 이득(g) 값을 선택합니다. g를 값
1에 가깝게 조정하면 추정 역기전력의 오차가 감소합니다. 그러나 이로 인해 수렴이 느려집니다.블록 샘플 시간과 작동 역기전력의 최대 기울기를 기준으로 (을 충족하는) m 값을 선택합니다.
b, m, g를 기준으로 (을 충족하는) 전류 관측기 이득(η) 값을 선택합니다.
참고
슬라이딩 모드 관측기 이득을 조정하면 블록이 올바르게 작동합니다.
개루프 제어를 사용하여 모터를 구동할 때 슬라이딩 모드 관측기와 실제 센서 하드웨어를 모두 사용하여 회전자 위치를 계산하고 계산된 위치 값을 비교하십시오. 그 차이가 허용 가능한 수준이면 블록이 올바르게 작동하는 것입니다. 그렇지 않으면 슬라이딩 모드 관측기 이득을 수동으로 조정하여 블록이 정확하게 작동하도록 하십시오.
전류와 전압의 잡음으로 인해 개루프 제어에서 폐루프 제어로 전환하지 못할 수 있습니다. 전환에 성공하려면 필터 차단 주파수(Hz) 파라미터의 값을 줄여 보십시오.
예제
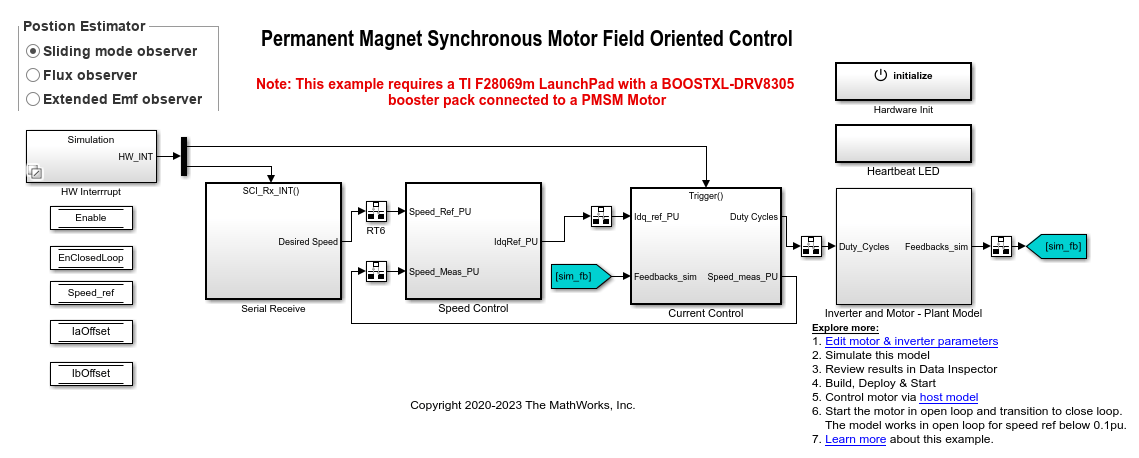
PMSM의 센서리스 자속 기준 제어
이 예제에서는 3상 영구 자석 동기 모터(PMSM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.
포트
입력
출력
파라미터
참고 문헌
[1] A. Podder and D. Pandit, "Study of Sensorless Field-Oriented Control of SPMSM Using Rotor Flux Observer & Disturbance Observer Based Discrete Sliding Mode Observer," 2021 IEEE 22nd Workshop on Control and Modelling of Power Electronics (COMPEL), 2021, pp. 1-8. (doi: 10.1109/COMPEL52922.2021.9645939)
[2] T. Bernardes, V. F. Montagner, H. A. Gründling, and H. Pinheiro, "Discrete-Time Sliding Mode Observer for Sensorless Vector Control of Permanent Magnet Synchronous Machine," in IEEE Transactions on Industrial Electronics, vol. 61, no. 4, pp. 1679-1691, 2014
[3] B. Bose, Modern Power Electronics and AC Drives. Prentice Hall, 2001. ISBN-0-13-016743-6.
[4] J. Liu and X. Wan, "Advanced Sliding Mode Control for Mechanical Systems". Springer-Verlag Berlin Heidelberg, 2011.
확장 기능
버전 내역
R2021b에 개발됨