이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
Extended EMF Observer
라이브러리:
Motor Control Blockset /
Sensorless Estimators
설명
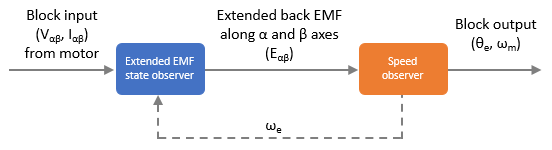
Extended EMF Observer 블록은 고정자 αβ 기준 프레임에서 측정된 전압 및 전류로부터 PMSM의 기계적 속도뿐만 아니라 전기적 위치 θe(즉, sin θe와 cos θe)를 계산합니다.
이 블록은 확장 역기전력을 추정하는 선형 확장 EMF 상태 관측기를 포함합니다. 그리고 추정된 역기전력 값에서 잡음을 제거하기 위해 저역통과 필터를 사용합니다. 또한 이 블록은 속도 관측기 역할을 하는 피드포워드 기반 쿼드라쳐 위상 고정 루프(PLL)도 포함합니다. 이 속도 관측기는 계산된 확장 역기전력을 사용하여 모터 속도를 결정합니다. 그리고 일정한 각가속도가 적용되는 동안에도 오차 없이 속도를 계산합니다. 그런 다음, 이 블록은 추정된 모터 전기적 속도에서 위치 출력값을 계산합니다.
방정식
IPMSM 상태 방정식은 다음으로 정의됩니다.
다음 방정식은 차수가 축소된 PMSM 상태 모델을 나타냅니다.
확장 역기전력
다음 방정식은 차원이 축소된 상태 관측기를 나타냅니다.
다음 방정식은 확장 EMF 관측기 파라미터를 나타냅니다.
수렴을 보장하기 위해 를 설정하고 α를 음수 값으로 설정하면 확장 EMF 관측기 이득은 다음과 같이 결정될 수 있습니다.
여기서
, ,
.
, ,
, ,
, ,
참고
A와 C는 관측 가능한 쌍입니다.
""과 ""은 각각 1계 미분 연산자와 2계 미분 연산자입니다.
vα와 vβ는 각각 α축을 따르는 고정자 전압과 β축을 따르는 고정자 전압입니다.
iα와 iβ는 각각 α축을 따르는 고정자 전류와 β축을 따르는 고정자 전류입니다.
eα와 eβ는 각각 α축을 따르는 확장 역기전력과 β축을 따르는 확장 역기전력입니다.
id와 iq는 각각 d축을 따르는 고정자 전류와 q축을 따르는 고정자 전류입니다.
R은 PMSM의 고정자 저항입니다.
Ld와 Lq는 각각 d축과 q축 간 PMSM의 고정자 인덕턴스입니다.
KE는 EMF 상수입니다.
ωre는 전기각에서의 각속도입니다.
θre는 전기각에서의 회전자 위치입니다.
은 추정된 값입니다.
ξ는 피드백 이득입니다.
예제
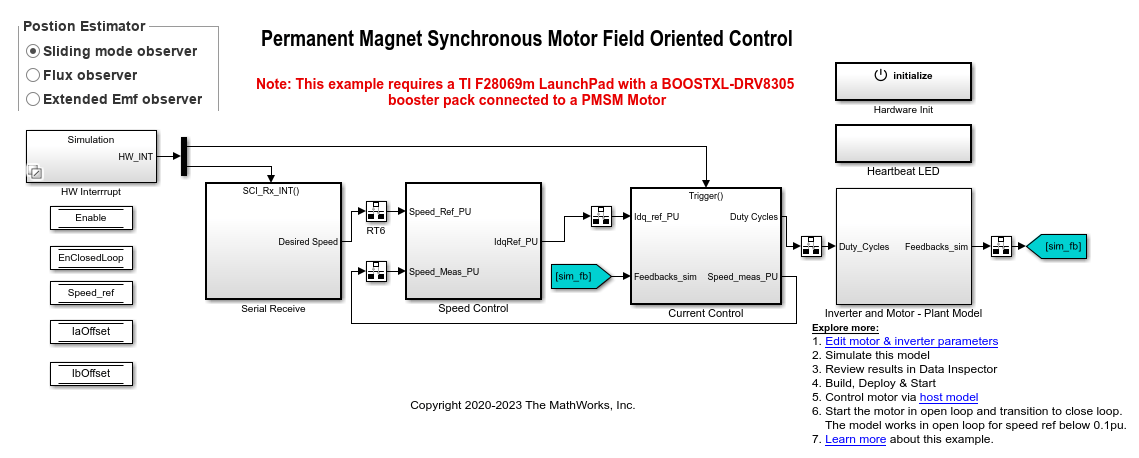
PMSM의 센서리스 자속 기준 제어
이 예제에서는 3상 영구 자석 동기 모터(PMSM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.
포트
입력
출력
파라미터
참고 문헌
[1] Zhiqian Chen, M. Tomita, S. Doki and S. Okuma, "An extended electromotive force model for sensorless control of interior permanent-magnet synchronous motors," in IEEE Transactions on Industrial Electronics, vol. 50, no. 2, pp. 288-295, April 2003, doi: 10.1109/TIE.2003.809391.
[2] T. Ohnuma, S. Doki and S. Okuma, "Extended EMF observer for wide speed range sensorless control of salient-pole synchronous motor drives," The XIX International Conference on Electrical Machines - ICEM 2010, Rome, Italy, 2010, pp. 1-6, doi: 10.1109/ICELMACH.2010.5608087.
[3] G. Liu, H. Zhang and X. Song, "Position-Estimation Deviation-Suppression Technology of PMSM Combining Phase Self-Compensation SMO and Feed-Forward PLL," in IEEE Journal of Emerging and Selected Topics in Power Electronics, vol. 9, no. 1, pp. 335-344, Feb. 2021, doi: 10.1109/JESTPE.2020.2967508.
확장 기능
버전 내역
R2023a에 개발됨