atan2
4사분면 역탄젠트 계산
라이브러리:
Motor Control Blockset /
Controls /
Math Transforms
Motor Control Blockset HDL Support /
Controls /
Math Transforms
설명
atan2 블록은 두 개의 실수에 대해 4사분면 역탄젠트를 계산합니다.
방정식
다음 방정식은 블록이 4사분면 역탄젠트(θ)를 계산하는 방법을 설명합니다.
여기서
포트
입력
출력
역탄젠트로 표현되는 각도입니다. 양의 x축을 기준으로 원점에서 지정된 점 (x,y)까지의 벡터가 이루는 각도입니다.
데이터형: single | double | fixed point
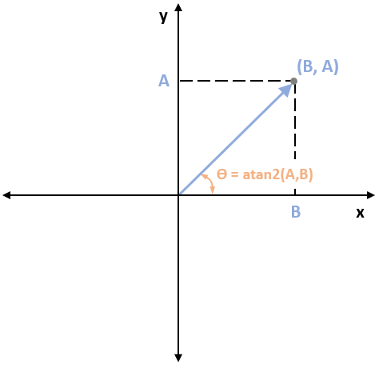
다음 그림은 입력값 A, B, 역탄젠트를 x-y 좌표 평면에 표현한 것입니다.
파라미터
확장 기능
버전 내역
R2020a에 개발됨