이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
속도 제어 알고리즘 설계하기
다음 단계를 따라 속도 제어 알고리즘을 설계합니다.
속도 제어기 서브시스템을 만듭니다. 앞에서 만든 전류 제어기 서브시스템은 속도 제어기 서브시스템의
Iq_ref전류 출력을 입력으로 사용합니다.속도 제어기 서브시스템을 만들려면 Simulink® 라이브러리 브라우저를 열고
Motor Control Blockset/Controls/Controllers라이브러리에서 Discrete PI Controller with anti-windup & reset 블록을 선택하십시오.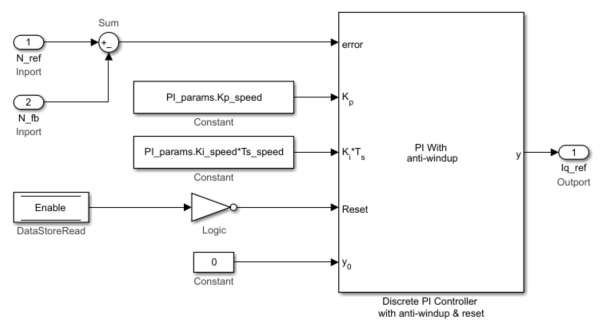
(모델 초기화 스크립트의) MATLAB® 함수
mcb.getPIControllerParameters는 d축 및 q축 전류 제어기와 속도 제어기의 PI 제어 이득을 계산합니다. 제어기 이득 계산에 대한 자세한 내용은 제어 이득 추정 및 유틸리티 함수 사용하기 항목을 참조하십시오. 예를 들어500μs의 샘플링 시간(Ts_speed)을 사용하는 모델 초기화 스크립트 파일mcb_pmsm_foc_qep_f28379d_data.m(예제 쿼드라쳐 인코더를 사용한 PMSM의 자속 기준 제어에 사용됨)을 참조하십시오. 선택적으로, Enable Data-Store Memory 블록을 사용하여 제어기를 재설정할 수 있습니다.속도 제어기를 위한 서브시스템을 만든 다음,
Simulink/Signal Attributes라이브러리의 Rate Transition 블록들을 그 샘플 시간(속도 제어 루프의 실행 시간)을 Ts_speed로 설정하여 서브시스템 입력에 추가합니다.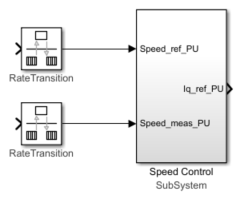
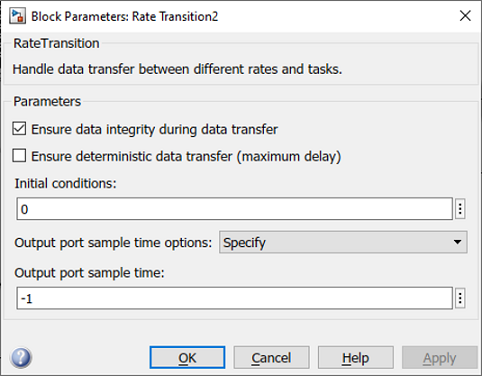
2단계에서 만든 속도 제어기 서브시스템을 전류 제어기와 플랜트 모델이 통합된 서브시스템에 통합합니다. 속도 제어기 서브시스템의 Iq_ref_PU 출력 포트를 Rate Transition 블록을 통해 전류 제어기 서브시스템 입력 포트에 연결합니다. 두 포트가 서로 다른 샘플 레이트로 실행되므로 Rate Transition 블록이 필요합니다. 다음 그림은 속도 제어기 서브시스템과 전류 제어기 서브시스템에 연결된 Rate Transition 블록의 파라미터 설정 예를 보여줍니다.
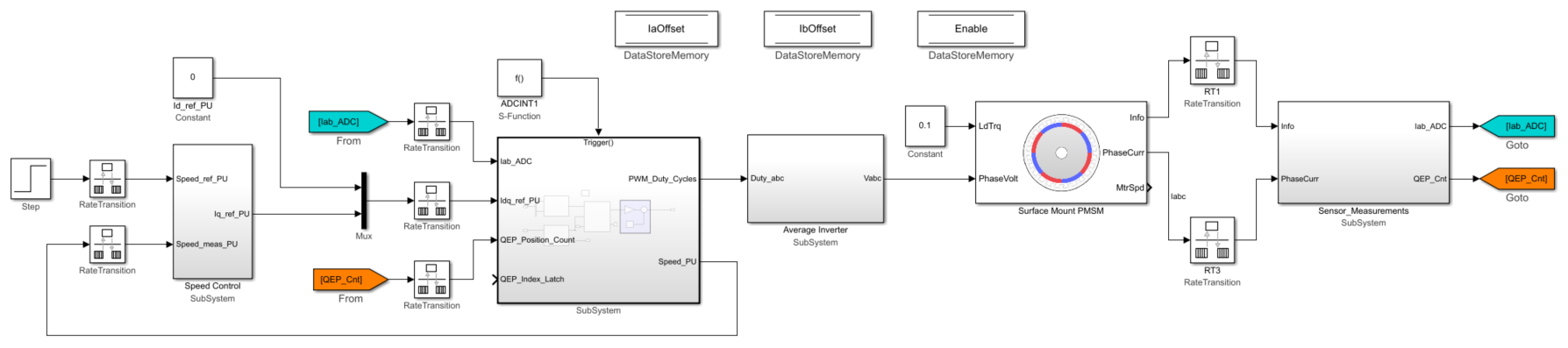
다음 그림은 속도 제어기, 전류 제어기 및 플랜트 모델이 통합된 서브시스템을 보여줍니다.