이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
자속 기준 제어(FOC)
벡터 제어라고도 알려진 자속 기준 제어(FOC)는 영구 자석 동기 모터(PMSM)와 AC 유도 모터(ACIM)를 제어하는 데 사용되는 기법입니다. FOC는 전체 토크 및 속도 범위에 대해 우수한 제어 기능을 제공합니다. FOC 구현에서는 고정자 전류를 고정자 기준 프레임에서 회전자 플럭스 기준 프레임(d-q 기준 프레임이라고도 함)으로 변환해야 합니다.
속도 제어와 토크 제어는 가장 일반적으로 사용되는 FOC 제어 모드입니다. 위치 제어 모드는 자주 사용되지 않습니다. 대부분의 구동 응용 사례에서는 모터 제어 시스템이 기준 토크 값을 추종하는 토크 제어 모드를 사용합니다. 속도 제어 모드에서 모터 제어기는 기준 속도 값을 추종하고 내부 서브시스템을 형성하는 토크 제어를 위한 토크 기준을 생성합니다. 위치 제어 모드에서는 속도 제어기가 내부 서브시스템을 형성합니다.
FOC 알고리즘 구현에는 전류와 회전자 위치의 실시간 피드백이 필요합니다. 센서를 사용하여 전류와 위치를 측정합니다. 실제 센서 기반 측정값 대신 추정된 피드백 값을 사용하는 센서리스 기법을 사용할 수도 있습니다.
참고
Motor Control Blockset™ 예제에서는 PU(per-unit) 계산과 관련된 고려 사항 때문에 토크 기준 T_ref 대신 전류 기준 Iq_ref를 속도 제어기 출력값으로 사용합니다. 예제 알고리즘에서는 전류와 토크의 PU 기준 값이 동일하도록(Iq_ref_pu = T_ref_pu) 전류와 토크의 기본 값(Iq_base 및 T_base)을 선택합니다.
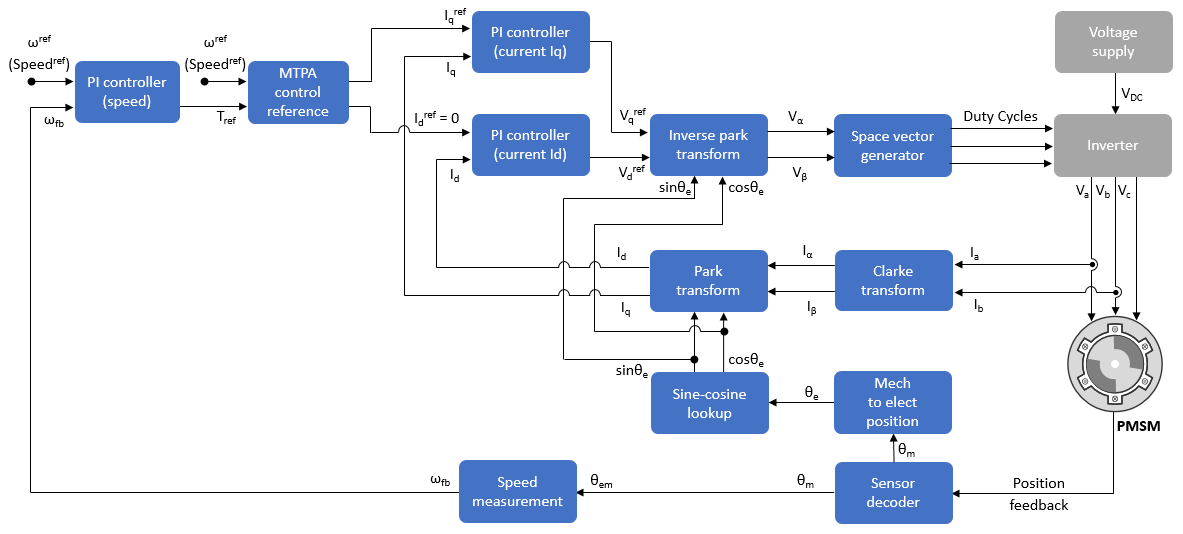
영구 자석 동기 모터(PMSM)
다음 그림은 PMSM의 FOC 아키텍처를 보여줍니다. Motor Control Blockset이 PMSM의 FOC를 구현하는 데 사용하는 자세한 일련의 방정식과 가정은 PMSM의 수학적 모델 항목을 참조하십시오.
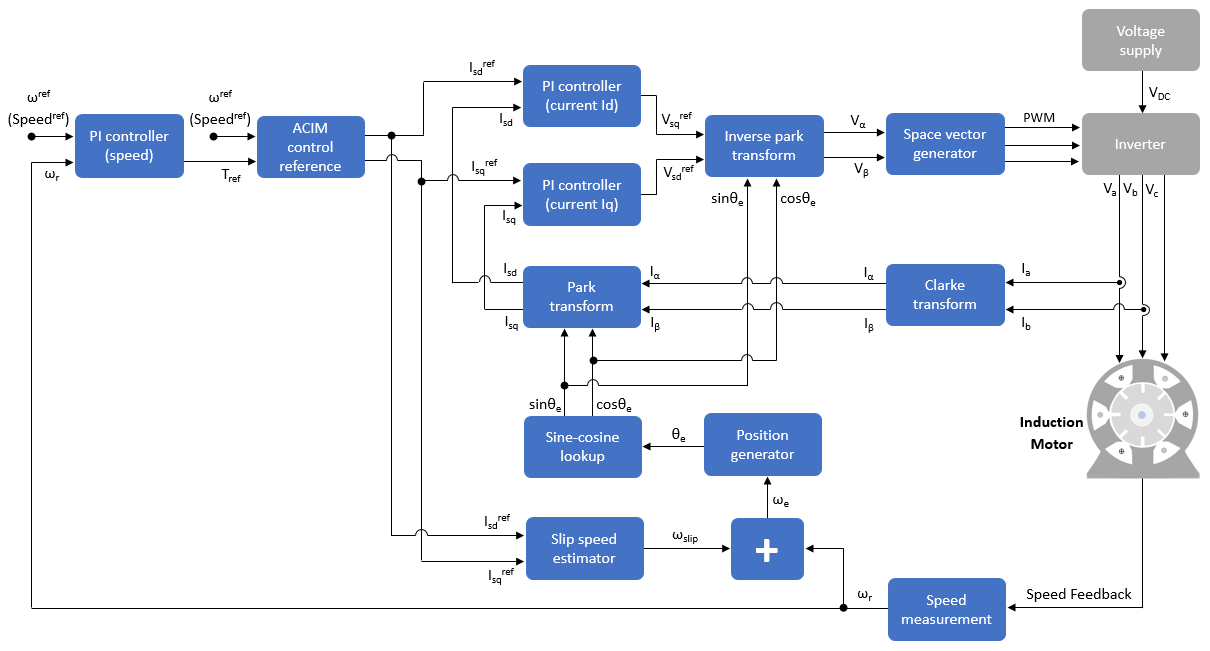
AC 유도 모터(ACIM)
다음 그림은 AC 유도 모터(ACIM)의 FOC 아키텍처를 보여줍니다. Motor Control Blockset이 유도 모터의 FOC를 구현하는 데 사용하는 자세한 일련의 방정식과 가정은 Mathematical Model of Induction Motor 항목을 참조하십시오.