Inverse Clarke Transform
αβ에서 abc로의 변환 구현
라이브러리:
Motor Control Blockset /
Controls /
Math Transforms
Motor Control Blockset HDL Support /
Controls /
Math Transforms
설명
Inverse Clarke Transform 블록은 고정자 αβ 기준 프레임에서 평형 2상 직교 성분의 Clarke 역변환을 계산하고 고정자 abc 기준 프레임에서 평형 3상 성분을 출력합니다. 또는 이 블록은 성분 α, β, 0의 Clarke 역변환을 계산하고 3상 성분 a, b, c를 출력할 수 있습니다. 평형 시스템에서 제로-시퀀스 성분(즉, 영상분)은 0입니다. 입력 개수 파라미터를 사용하여 2개 입력 또는 3개의 입력을 사용합니다.
이 블록은 α-β축 성분을 입력으로 받고 그에 대응하는 3상 신호를 출력합니다. 여기서 a상 축은 α축과 정렬됩니다.
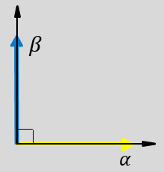
αβ 기준 프레임의 α 및 β 입력 성분
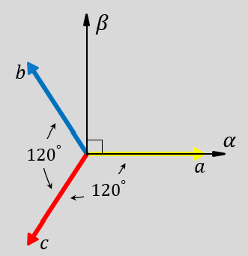
abc 기준 프레임과 αβ 기준 프레임에서의 등가 a, b, c 출력 성분의 방향
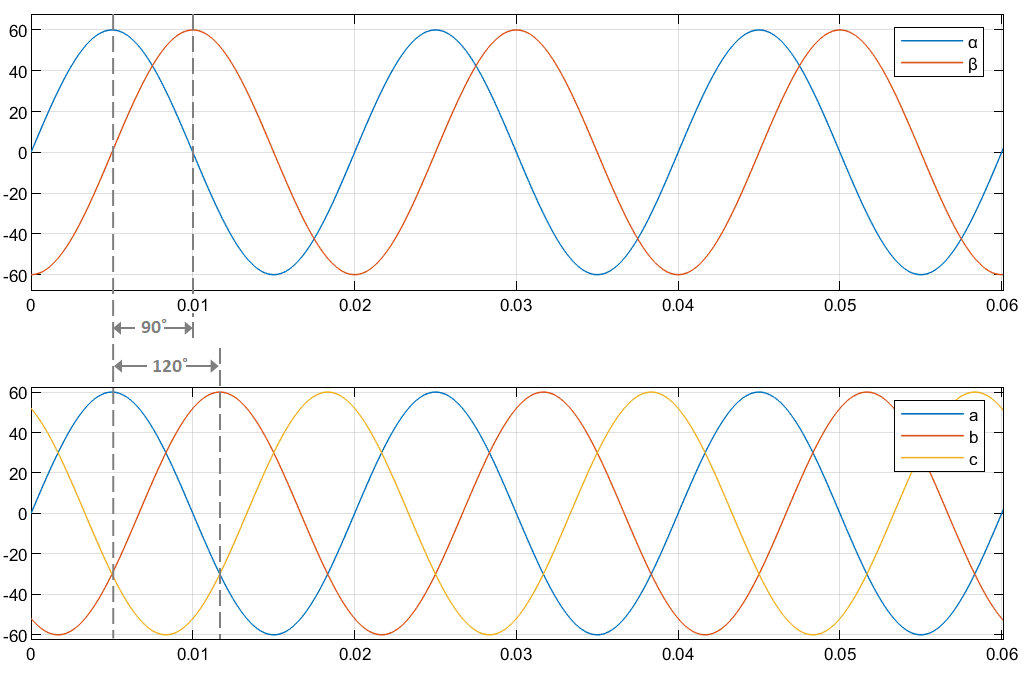
등가 평형 αβ 시스템과 abc 시스템의 개별 성분의 시간 응답
방정식
다음 방정식은 Clarke 역변환 계산을 나타냅니다.
모터와 같은 평형 시스템의 경우 영상 성분 계산은 다음과 같이 항상 0입니다.
따라서 3상 모터 드라이브에서는 전류 센서 2개만 사용할 수 있으며, 세 번째 상을 다음과 같이 계산할 수 있습니다.
이 블록은 다음 방정식을 사용하여 Clarke 역변환을 다음과 같이 구현합니다.
여기서
및 는 고정자 αβ 기준 프레임에서의 평형 2상 직교 성분입니다.
은 고정자 αβ 기준 프레임에서의 제로-시퀀스 성분입니다.
, , 는 abc 기준 프레임에서의 평형 3상 성분입니다.
포트
입력
출력
파라미터
확장 기능
버전 내역
R2020a에 개발됨