속도 제어기의 이득을 수동으로 조정하기
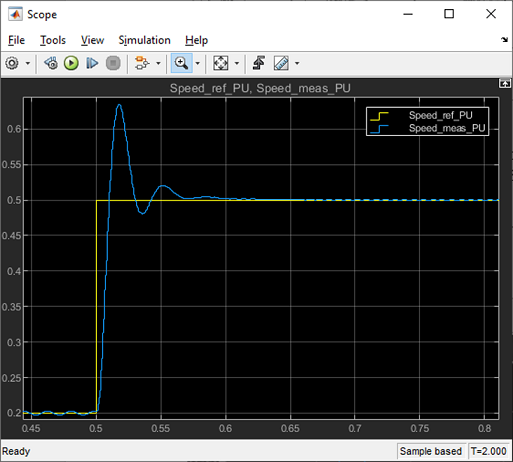
속도 제어기 서브시스템을 수동으로 조정하려면 속도 제어기 서브시스템(Speed Control)의 Speed_ref_PU 입력에 스텝(계단) 형태의 입력(0.2 ~ 0.5 PU 범위)을 제공하십시오. 측정된 속도 계단 응답 Speed_meas_PU를 모니터링하고, 제어 목표에 맞게 속도 제어기 서브시스템 파라미터를 조정합니다.
다음 그림은 속도 제어기의 계단 응답을 보여줍니다.
이 절차에서는 시뮬레이션에서 PMSM에 대한 속도 제어를 구현하는 방법을 보여줍니다. 시뮬레이션을 실행하고 제어기 성능을 분석합니다.
Embedded Coder®를 사용하여 이 제어 알고리즘에서 C 코드를 생성할 수 있습니다. 또한 이 코드와 하드웨어 드라이버를 타깃 하드웨어에 배포할 수도 있습니다.