직접 토크 제어(DTC)
직접 토크 제어(DTC)는 모터의 플럭스와 토크를 직접 제어하여 모터 속도 제어를 구현하는 벡터 모터 제어 기법입니다. d축 모터 전류와 q축 모터 전류를 제어하는 자속 기준 제어(FOC)와 달리, DTC 알고리즘은 모터 위치와 전류에서 토크 값과 플럭스 값을 추정합니다. 그런 다음 PI 제어기를 사용해 모터 토크와 플럭스를 제어하여 최종적으로 모터를 구동하는 최적 전압을 생성합니다.
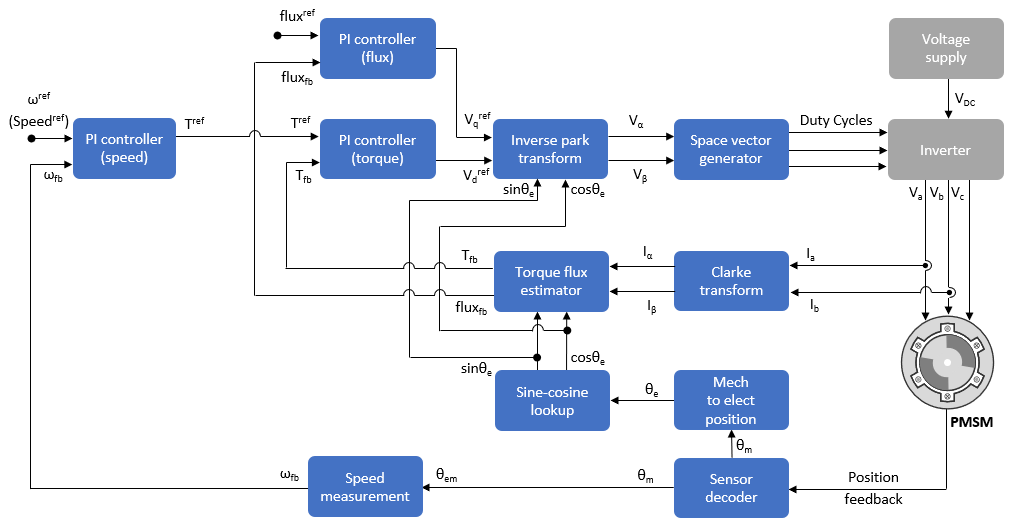
Motor Control Blockset™은 DTC 공간 벡터 펄스 폭 변조(DTC-SVPWM) Variant를 사용하여 영구 자석 동기 모터(PMSM)를 제어합니다. 이 기법은 공간 벡터 변조(SVM)를 사용하여, 인버터에서 사용되는 펄스 폭 변조(PWM) 듀티 사이클을 만들어서 PMSM을 구동하는 3상 전압을 생성합니다.
DTC-SVPWM 알고리즘은 (α-β 기준 프레임에서) 모터의 전류 피드백을 사용하여 모터 토크 피드백 값과 플럭스 피드백 값을 추정합니다. 이 알고리즘은 모터 속도 피드백을 사용하여 플럭스 기준 값을 계산합니다. 속도 PI 제어기(외부 제어 루프의 일부)는 속도 오차 입력값을 사용하여 토크 기준 값을 계산합니다. 플럭스 PI 제어기와 토크 PI 제어기(내부 제어 루프의 일부)는 이러한 플럭스 기준과 토크 기준, 그리고 플럭스 피드백 값과 토크 피드백 값을 사용하여 d축 기준 전압과 q축 기준 전압을 계산합니다. 이 알고리즘은 PWM Reference Generator 블록을 사용하여 이러한 기준 전압에서 PWM 듀티 사이클을 생성합니다(SVM 사용).
센서 기반 접근법과 센서리스 접근법을 모두 사용하여 현재의 회전자 위치를 결정할 수 있습니다.
플럭스와 토크 추정
Motor Control Blockset에서 사용되는 DTC-SVPWM 알고리즘은 다음의 과도 기계 모델 방정식을 사용하여 PMSM의 플럭스와 토크를 추정합니다.
다음 방정식은 α-β 기준 프레임과 회전자 위치에서의 전류로부터 플럭스를 추정하는 방법을 설명합니다.
다음 방정식은 플럭스의 PU(Per-Unit) 계산을 나타냅니다.
다음 방정식은 α-β 기준 프레임에서의 전류로부터 토크를 추정하는 방법을 설명합니다.
다음 방정식은 토크의 PU(Per-Unit) 계산을 나타냅니다.
여기서
ψ는 PMSM의 회전자 플럭스입니다(웨버).
ψpu는 ψ의 per-unit 버전입니다(웨버).
ψα는 α-β 기준 프레임의 α축을 따르는 회전자 플럭스입니다(웨버).
ψαpu는 ψα의 per-unit 버전입니다(웨버).
ψβ는 α-β 기준 프레임의 β축을 따르는 회전자 플럭스입니다(웨버).
ψβpu는 ψβ의 per-unit 버전입니다(웨버).
ψPM은 PMSM의 영구 자석 쇄교 자속입니다(웨버).
ψPMpu는 ψPM의 per-unit 버전입니다(웨버).
Ls는 PMSM의 고정자 인덕턴스입니다(헨리).
Lspu는 Ls의 per-unit 버전입니다(헨리).
iα는 α-β 기준 프레임의 α축을 따르는 모터 전류입니다(암페어).
iαpu는 iα의 per-unit 버전입니다(암페어).
iβ는 α-β 기준 프레임의 β축을 따르는 모터 전류입니다(암페어).
iβpu는 iβ의 per-unit 버전입니다(암페어).
θ는 (센서로 캡처하거나 센서리스 위치 추정을 통해 확인한) 회전자 위치입니다(라디안).
ωbase는 모터의 기계적 베이스 속도입니다(라디안/초).
fbase는 모터의 기계 주파수입니다(헤르츠).
T는 회전자 토크입니다(Nm).
Tpu는 T의 per-unit 버전입니다(Nm).
p는 모터의 극쌍 개수입니다.