6단계 정류
6단계 정류 기법을 이용한 모터 제어 알고리즘 설계
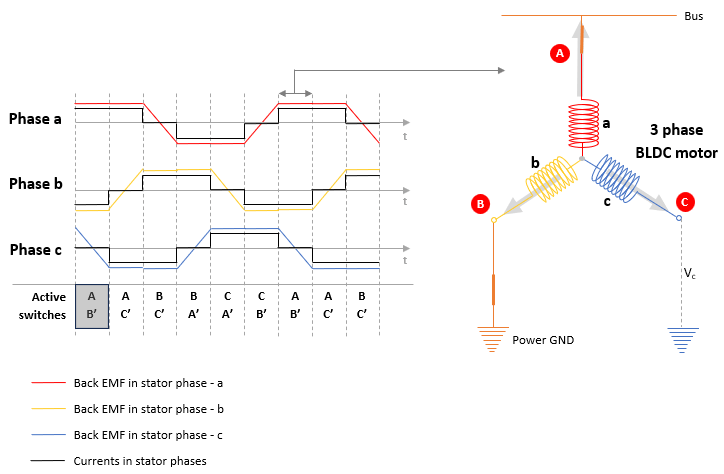
6단계 정류(사다리꼴 제어라고도 함)는 고정자 상을 순차적으로 통전시켜 BLDC(브러시리스 DC) 모터를 구동하는 데 사용되는 기본적인 기술입니다. 이 과정은 하나의 전기 회전을 60도씩 6개의 동일한 구간으로 나누고, 각 구간에 고유한 스위칭 상태를 할당하는 것을 포함합니다. 특정 단계에서는 세 개의 모터 상 중 두 개가 전원을 공급받는데, 하나는 양극 DC 버스에 연결되고 다른 하나는 음극에 연결되며, 나머지 한 상은 부동 상태로 유지됩니다. 동기화를 유지하기 위해 컨트롤러는 일반적으로 홀 효과 센서를 사용하여 회전자의 자기적 위치를 감지하고 다음 정류 상태로 전환하도록 신호를 보냅니다. 이 순서는 고정자 내에 회전 자기장을 생성하여 영구자석 회전자를 뒤따라오게 하지만, 이산 스위칭 방식은 본질적으로 사인파 방식보다 더 큰 토크 리플을 발생시킵니다.
블록
추천 예제

센서 피드백을 사용한 BLDC 모터의 6단계 정류
6단계 정류 기법을 사용하여 3상 BLDC 모터의 회전 속도와 회전 방향을 제어합니다.
6단계 정류를 사용한 BLDC 모터의 센서리스 속도 제어
이 예제에서는 120도 전도 모드를 사용해 6단계 정류 기법을 구현하고 3상 브러시리스 DC(BLDC) 모터의 속도를 제어합니다. 또한 Sensorless Six-Step Commutation 블록으로 생성된 듀티 사이클과 함께 기계적 속도를 사용하여 3상 고정자 전압을 제어하며, 결과적으로 회전자 속도도 제어합니다.