이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
zpk
영점-극점-이득 모델
설명
zpk를 사용하여 영점-극점-이득 모델을 만들거나 동적 시스템 모델을 영점-극점-이득 형식으로 변환합니다.
영점-극점-이득 모델은 전달 함수가 분해된 형식으로 표현된 것입니다. 예를 들어 다음과 같은 연속시간 SISO 전달 함수가 있다고 가정하겠습니다.
G(s)는 다음과 같이 영점-극점-이득 형식으로 분해될 수 있습니다.
SISO 영점-극점-이득 모델의 더 일반적인 표현은 다음과 같습니다.
여기서 z와 p는 실수 값 또는 복소수 값의 영점 및 극점으로 구성된 벡터이고 k는 실수 값 또는 복소수 값의 스칼라 이득입니다. MIMO 모델의 경우, 각 I/O 채널은 하나의 전달 함수 hij(s)로 표현됩니다.
영점-극점-이득 모델 객체는 극점, 영점 및 이득을 직접 지정하거나 다른 유형의 모델(예: 상태공간 모델 ss)을 영점-극점-이득 형식으로 변환하여 만들 수 있습니다.
zpk를 사용하여 일반화된 상태공간(genss) 모델 또는 불확실 상태공간(uss (Robust Control Toolbox)) 모델을 만들 수도 있습니다.
생성
구문
설명
ZPK 모델 만들기
ZPK 모델로 변환
sys = zpk(ltiSys,Name=Value)ltiSys의 절단된 zpk 표현을 얻습니다. 이 방법은 각 입력-출력 쌍에 대해 영점을 계산하므로 입력-출력 크기가 작은 모델에 가장 적합합니다. (R2025a 이후)
입력 인수
이름-값 인수
출력 인수
속성
객체 함수
다음 목록은 일부이기는 하나 zpk 모델과 함께 사용할 수 있는 대표적인 함수들입니다. 일반적으로, 동적 시스템 모델에 적용되는 모든 함수는 zpk 객체에 적용됩니다.
예제
이 예제에서는 다음과 같은 연속시간 SISO 영점-극점-이득 모델이 있다고 가정하겠습니다.
영점, 극점 및 이득을 지정하고, SISO 영점-극점-이득 모델을 만듭니다.
zeros = 0; poles = [1-1i 1+1i 2]; gain = -2; sys = zpk(zeros,poles,gain)
sys =
-2 s
--------------------
(s-2) (s^2 - 2s + 2)
Continuous-time zero/pole/gain model.
Model Properties
이 예제에서는 다음과 같이 샘플 시간이 0.1초인 SISO 이산시간 영점-극점-이득 모델이 있다고 가정하겠습니다.
영점, 극점, 이득 및 샘플 시간을 지정하고 이산시간 SISO 영점-극점-이득 모델을 만듭니다.
zeros = [1 2 3]; poles = [6 5 4]; gain = 7; ts = 0.1; sys = zpk(zeros,poles,gain,ts)
sys = 7 (z-1) (z-2) (z-3) ------------------- (z-6) (z-5) (z-4) Sample time: 0.1 seconds Discrete-time zero/pole/gain model. Model Properties
이 예제에서는 SISO 영점-극점-이득 모델을 결합하여 MIMO 영점-극점-이득 모델을 만듭니다. 다음과 같은 1-입력 2-출력 연속시간 영점-극점-이득 모델이 있다고 가정하겠습니다.
SISO 항목을 결합하여 MIMO 영점-극점-이득 모델을 지정합니다.
zeros1 = 1; poles1 = -1; gain = 1; sys1 = zpk(zeros1,poles1,gain)
sys1 = (s-1) ----- (s+1) Continuous-time zero/pole/gain model. Model Properties
zeros2 = -2; poles2 = [-2+1i -2-1i]; sys2 = zpk(zeros2,poles2,gain)
sys2 =
(s+2)
--------------
(s^2 + 4s + 5)
Continuous-time zero/pole/gain model.
Model Properties
sys = [sys1;sys2]
sys =
From input to output...
(s-1)
1: -----
(s+1)
(s+2)
2: --------------
(s^2 + 4s + 5)
Continuous-time zero/pole/gain model.
Model Properties
이산시간 다중 입력 다중 출력 모델에 대한 영점-극점-이득 모델을 만듭니다.
샘플 시간은 ts = 0.2초입니다.
영점과 극점을 셀형 배열로 지정하고 이득을 배열로 지정합니다.
zeros = {[] 0;2 []};
poles = {-0.3 -0.3;-0.3 -0.3};
gain = [1 1;-1 3];
ts = 0.2;이산시간 MIMO 영점-극점-이득 모델을 만듭니다.
sys = zpk(zeros,poles,gain,ts)
sys =
From input 1 to output...
1
1: -------
(z+0.3)
- (z-2)
2: -------
(z+0.3)
From input 2 to output...
z
1: -------
(z+0.3)
3
2: -------
(z+0.3)
Sample time: 0.2 seconds
Discrete-time zero/pole/gain model.
Model Properties
샘플 시간과 함께 영점, 극점 및 이득을 지정하고, 이름-값 쌍으로 상태 및 입력 이름을 지정하여 영점-극점-이득 모델을 만듭니다.
zeros = 4; poles = [-1+2i -1-2i]; gain = 3; ts = 0.05; sys = zpk(zeros,poles,gain,ts,'InputName','Force')
sys =
From input "Force" to output:
3 (z-4)
--------------
(z^2 + 2z + 5)
Sample time: 0.05 seconds
Discrete-time zero/pole/gain model.
Model Properties
입력 이름의 개수는 영점의 개수와 일치해야 합니다.
입력 이름과 출력 이름을 지정하면 MIMO 시스템의 응답 플롯을 처리할 때 유용할 수 있습니다.
step(sys)

계단 응답 플롯 제목에 입력 이름 Force가 있습니다.
이 예제에서는 유리식을 사용하여 연속시간 영점-극점-이득 모델을 만듭니다. 유리식을 사용하는 것이 영점과 극점을 지정하는 것보다 쉽고 직관적인 경우가 있습니다.
다음과 같은 시스템이 있다고 가정하겠습니다.
전달 함수 모델을 만들려면 먼저 s를 zpk 객체로 지정하십시오.
s = zpk('s')s = s Continuous-time zero/pole/gain model. Model Properties
유리식에 s를 사용하여 영점-극점-이득 모델을 만듭니다.
sys = s/(s^2 + 2*s + 10)
sys =
s
---------------
(s^2 + 2s + 10)
Continuous-time zero/pole/gain model.
Model Properties
이 예제에서는 유리식을 사용하여 이산시간 영점-극점-이득 모델을 만듭니다. 유리식을 사용하는 것이 영점과 극점을 지정하는 것보다 쉽고 직관적인 경우가 있습니다.
다음과 같은 시스템이 있다고 가정하겠습니다.
영점-극점-이득 모델을 만들려면 먼저 z를 zpk 객체와 샘플 시간 ts로 지정하십시오.
ts = 0.1;
z = zpk('z',ts)z = z Sample time: 0.1 seconds Discrete-time zero/pole/gain model. Model Properties
유리식에 z를 사용하여 영점-극점-이득 모델을 만듭니다.
sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys =
(z-1)
-------------------
(z^2 - 1.85z + 0.9)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
Model Properties
이 예제에서는 다른 영점-극점-이득 모델에서 상속한 속성을 사용하여 영점-극점-이득 모델을 만듭니다. 다음과 같은 두 개의 영점-극점-이득 모델이 있다고 가정하겠습니다.
이 예제에서는 TimeUnit 및 InputDelay 속성을 'minutes'로 설정한 상태로 sys1을 만듭니다.
zero1 = 0; pole1 = [0;-8]; gain1 = 2; sys1 = zpk(zero1,pole1,gain1,'TimeUnit','minutes','InputUnit','minutes')
sys1 =
2 s
-------
s (s+8)
Continuous-time zero/pole/gain model.
Model Properties
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
sys1에서 상속한 속성으로 두 번째 영점-극점-이득 모델을 만듭니다.
zero = 1; pole = [-3,5]; gain2 = 0.8; sys2 = zpk(zero,pole,gain2,sys1)
sys2 = 0.8 (s-1) ----------- (s+3) (s-5) Continuous-time zero/pole/gain model. Model Properties
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
영점-극점-이득 모델 sys2가 sys1과 동일한 속성을 가짐을 알 수 있습니다.
다음과 같은 2-입력 2-출력 정적 이득 행렬 m을 만듭니다.
이득 행렬을 지정하고 정적 이득 영점-극점-이득 모델을 만듭니다.
m = [2,4;...
3,5];
sys1 = zpk(m)sys1 = From input 1 to output... 1: 2 2: 3 From input 2 to output... 1: 4 2: 5 Static gain. Model Properties
위에서 얻은 정적 이득 영점-극점-이득 모델 sys1을 사용하여 이 모델을 다른 영점-극점-이득 모델에 종속 연결할 수 있습니다.
sys2 = zpk(0,[-1 7],1)
sys2 =
s
-----------
(s+1) (s-7)
Continuous-time zero/pole/gain model.
Model Properties
sys = series(sys1,sys2)
sys =
From input 1 to output...
2 s
1: -----------
(s+1) (s-7)
3 s
2: -----------
(s+1) (s-7)
From input 2 to output...
4 s
1: -----------
(s+1) (s-7)
5 s
2: -----------
(s+1) (s-7)
Continuous-time zero/pole/gain model.
Model Properties
이 예제에서는 다음 상태공간 모델의 영점-극점-이득 모델을 계산합니다.
상태공간 행렬을 사용하여 상태공간 모델을 만듭니다.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
상태공간 모델 ltiSys를 영점-극점-이득 모델로 변환합니다.
sys = zpk(ltiSys)
sys =
From input 1 to output:
s
--------------
(s^2 + 4s + 5)
From input 2 to output:
(s^2 + 5s + 8)
--------------
(s^2 + 4s + 5)
Continuous-time zero/pole/gain model.
Model Properties
for 루프를 사용하여 영점-극점-이득 모델로 구성된 배열을 지정할 수 있습니다.
먼저, 영점을 갖는 영점-극점-이득 모델 배열을 사전할당합니다.
sys = zpk(zeros(1,1,3));
처음 2개의 인덱스는 모델의 출력 개수와 입력 개수를 나타내고, 세 번째 인덱스는 배열에 있는 모델의 개수를 나타냅니다.
for 루프에서 유리식을 사용하여 영점-극점-이득 모델 배열을 만듭니다.
s = zpk('s'); for k = 1:3 sys(:,:,k) = k/(s^2+s+k); end sys
sys(:,:,1,1) =
1
-------------
(s^2 + s + 1)
sys(:,:,2,1) =
2
-------------
(s^2 + s + 2)
sys(:,:,3,1) =
3
-------------
(s^2 + s + 3)
3x1 array of continuous-time zero/pole/gain models.
Model Properties
이 예제에서는 식별된 다항식 모델의 측정된 성분과 잡음 성분을 2개의 개별적인 영점-극점-이득 모델로 추출합니다.
identifiedModel.mat에서 Box-Jenkins 다항식 모델 ltiSys를 불러옵니다.
load('identifiedModel.mat','ltiSys');
ltiSys는 형식의 식별된 이산시간 모델입니다. 여기서 는 측정된 성분을 나타내고 는 잡음 성분을 나타냅니다.
측정된 성분과 잡음 성분을 영점-극점-이득 모델로 추출합니다.
sysMeas = zpk(ltiSys,'measured') sysMeas =
From input "u1" to output "y1":
-0.14256 z^-1 (1-1.374z^-1)
z^(-2) * -----------------------------
(1-0.8789z^-1) (1-0.6958z^-1)
Sample time: 0.04 seconds
Discrete-time zero/pole/gain model.
Model Properties
sysNoise = zpk(ltiSys,'noise')sysNoise =
From input "v@y1" to output "y1":
0.045563 (1+0.7245z^-1)
--------------------------------------------
(1-0.9658z^-1) (1 - 0.0602z^-1 + 0.2018z^-2)
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time zero/pole/gain model.
Model Properties
측정된 성분은 플랜트 모델로 기능할 수 있고, 잡음 성분은 제어 시스템 설계를 위한 외란 모델로 사용할 수 있습니다.
이 예제에서는 입력 지연이 0.5초이고 출력 지연이 2.5초인 SISO 영점-극점-이득 모델을 만듭니다.
zeros = 5; poles = [7+1i 7-1i -3]; gains = 1; sys = zpk(zeros,poles,gains,'InputDelay',0.5,'OutputDelay',2.5)
sys =
(s-5)
exp(-3*s) * ----------------------
(s+3) (s^2 - 14s + 50)
Continuous-time zero/pole/gain model.
Model Properties
get 명령을 사용하여 MATLAB 객체의 모든 속성을 표시할 수도 있습니다.
get(sys)
Z: {[5]}
P: {[3×1 double]}
K: 1
DisplayFormat: 'roots'
Variable: 's'
IODelay: 0
InputDelay: 0.5000
OutputDelay: 2.5000
InputName: {''}
InputUnit: {''}
InputGroup: [1×1 struct]
OutputName: {''}
OutputUnit: {''}
OutputGroup: [1×1 struct]
Notes: [0×1 string]
UserData: []
Name: ''
Ts: 0
TimeUnit: 'seconds'
SamplingGrid: [1×1 struct]
LTI 모델의 시간 지연을 지정하는 방법에 대한 자세한 내용은 Specifying Time Delays 항목을 참조하십시오.
이 예제에서는 다음의 영점-극점-이득 모델로 표현되는 시스템에 대해 목표 대역폭이 0.75 rad/s인 2-DOF PID 제어기를 설계합니다.
zpk 명령을 사용하여 영점-극점-이득 모델 객체 sys를 만듭니다.
zeros = []; poles = [-0.25+0.2i;-0.25-0.2i]; gain = 1; sys = zpk(zeros,poles,gain)
sys =
1
---------------------
(s^2 + 0.5s + 0.1025)
Continuous-time zero/pole/gain model.
Model Properties
목표 대역폭으로 pidtune 항목을 사용하여 2-DOF 제어기를 생성합니다.
wc = 0.75;
C2 = pidtune(sys,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 0.512, Ki = 0.0975, Kd = 0.574, b = 0.38, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
'PID2' 유형을 사용하면 pidtune이 pid2 객체로 표현되는 2-DOF 제어기를 생성하게 됩니다. 이 결과가 표시되는 것을 확인할 수 있습니다. pidtune이 설정점 가중치 b, c를 포함해 모든 제어기 계수를 조정하여 성능과 강인성의 균형을 맞추는 것도 표시됩니다.
라이브 편집기에서의 대화형 방식 PID 조정에 대한 자세한 내용은 Tune PID Controller 라이브 편집기 작업을 참조하십시오. 이 작업은 대화형 방식으로 PID 제어기를 설계할 수 있도록 해주며 라이브 스크립트에 대한 MATLAB 코드를 자동으로 생성해 줍니다.
독립 실행형 앱에서 대화형 방식으로 PID 조정을 수행하려면 PID 조정기를 사용하십시오. 앱을 사용한 제어기 설계에 대한 예제는 빠른 기준 추종을 위한 PID 제어기 설계 항목을 참조하십시오.
R2025a 이후
이 예제는 희소 상태공간 모델의 절단된 영점-극점-이득 모델을 얻는 방법을 보여줍니다. 이 예제에서는 원형 원통형 막대의 열 분포에 대한 열 모델을 선형화하여 얻은 희소 모델을 사용합니다.
모델 데이터를 불러옵니다.
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
모델의 주파수 응답을 분석합니다.
sigmaplot(sys,w)
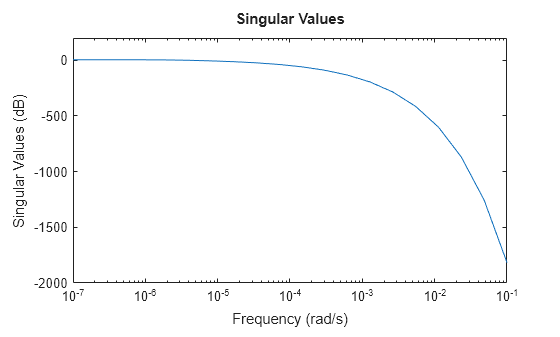
절단된 근사를 구하기 위해 zpk를 사용하고 관심 주파수 대역을 지정합니다. 이 모델에서는 0rad/s ~ 0.01rad/s 주파수 범위를 사용하여 저차 근사를 구할 수 있습니다.
zsys = zpk(sys,Focus=[0 1e-2],Display="off");주파수 응답을 비교합니다.
sigmaplot(sys,zsys,w)
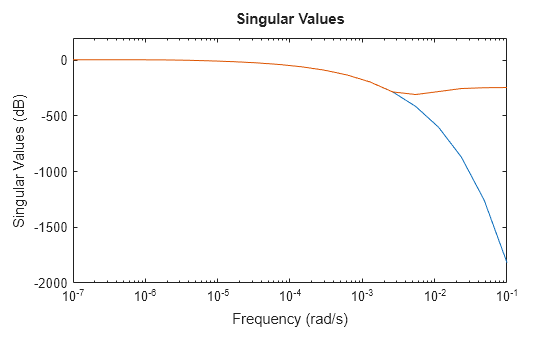
이 열 모델은 0.001rad/s를 넘어서면 매우 급격한 롤오프를 보입니다. 기본적으로 zpk를 사용하여 얻은 축소 모델은 이 롤오프와 잘 일치되지 않습니다. 이를 완화하려면 zpk의 RollOff 인수를 사용하여 관심 주파수 대역을 벗어날 경우에 대한 최소 롤오프 값을 지정할 수 있습니다. 롤오프 기울기 값을 -45로 지정합니다. 이 값은 최소 -900db/decade의 레이트에 해당합니다.
zsys2 = zpk(sys,Focus=[0 1e-2],RollOff=-45,Display="off");
sigmaplot(sys,zsys2,w)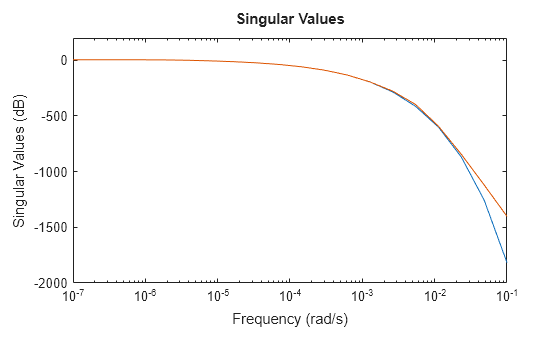
이제 축소된 모델이 롤오프 값을 훨씬 잘 근사합니다. 하지만 이 예제에서 zpk를 사용하여 롤오프 기울기를 재조정하려면 영점과 극점을 다시 계산해야 합니다. 이 경우 대규모 모델이면 계산 비용이 많이 들 수 있습니다. 대안으로, reducespec의 영점-극점 절단 방법을 사용할 수 있으며, 소프트웨어가 극점과 영점을 계산한 후 추가 계산 비용 없이 롤오프를 조정할 수 있습니다. 예제는 Zero-Pole Truncation of Thermal Model 항목을 참조하십시오.
알고리즘
zpk는 MATLAB 함수 roots를 사용하여 전달 함수를 변환하고 함수 zero와 pole을 사용하여 상태공간 모델을 변환합니다.
희소 모델을 변환하기 위해, zpk는 지정된 주파수 대역에서 극점과 영점을 계산하기 위한 역거듭제곱 반복에 크릴로프-슈어(Krylov-Schur) 알고리즘[1]을 사용합니다.
참고 문헌
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.