step
동적 시스템의 계단 응답
구문
설명
step은 U에서 U + dU까지의 입력값의 계단 변동에 대해 td 시간 단위 후의 계단 응답을 계산합니다.

여기서 각각은 다음을 나타냅니다.
t0은 시뮬레이션 시작 시간입니다.
td는 스텝 지연입니다.
U는 기준 입력값 또는 편향입니다.
dU는 계단 진폭입니다.
기본적으로, 이 함수는 t0 = 0, U = 0, dU = 1, td = 0의 값으로 계단 변동을 적용합니다. 하지만 RespConfig를 사용하여 이러한 값을 따로 구성할 수 있습니다. 또한 초기 상태 x(t0)을 지정할 수 있습니다. 초기 상태를 지정하지 않으면 step은 시스템의 초기 상태가 입력값 U에서 변동 없는 상태인 것으로 가정합니다.
[는 계단 진폭 또는 입력 오프셋과 같은 계단 응답을 계산하기 위한 추가 옵션을 지정합니다. y,tOut] = step(___,config)config를 생성하려면 RespConfig를 사용하십시오.
step(___)은 위에 열거된 모든 입력 인수의 조합에 디폴트 플로팅 옵션을 사용하여 sys의 계단 응답을 플로팅합니다. 추가 플롯 사용자 지정 옵션이 필요하면 stepplot을 사용하십시오.
여러 동적 시스템의 응답을 동일한 플롯에 플로팅하려면
sys를 쉼표로 구분된 모델 목록으로 지정할 수 있습니다. 예를 들어,step(sys1,sys2,sys3)은 세 모델의 응답을 동일한 플롯에 플로팅합니다.플롯에 있는 각 시스템의 색, 선 스타일 및 마커를 지정하려면 각 시스템의
LineSpec값을 지정합니다. 예를 들어,step(sys1,LineSpec1,sys2,LineSpec2)는 두 모델을 플로팅하고 각각의 플롯 스타일을 지정합니다.LineSpec값 지정에 대한 자세한 내용은stepplot항목을 참조하십시오.
예제
다음 전달 함수로 표현되는 연속시간 시스템의 계단 응답을 플로팅합니다.
이 예제에서는 전달 함수를 표현하는 tf 모델을 만듭니다. 다른 동적 시스템 모델 유형(예: 영점-극점 이득(zpk) 모델 또는 상태공간(ss) 모델)의 계단 응답도 비슷한 방식으로 플로팅할 수 있습니다.
sys = tf(4,[1 2 10]);
계단 응답을 플로팅합니다.
step(sys)

step 플롯에는 정상 상태 응답을 나타내는 가로 점선이 자동으로 포함됩니다. MATLAB® Figure 창에서, 플롯을 마우스 오른쪽 버튼으로 클릭하면 피크 응답, 정착 시간 등의 다른 계단 응답 특성을 볼 수 있습니다. 이러한 특성에 대한 자세한 내용은 stepinfo 항목을 참조하십시오.
이산시간 시스템의 계단 응답을 플로팅합니다. 시스템은 샘플 시간이 0.2초이며 다음 상태공간 행렬로 표현됩니다.
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;상태공간 모델을 만들고 이 모델의 계단 응답을 플로팅합니다.
sys = ss(A,B,C,D,0.2); step(sys)

계단 응답은 이 모델의 이산화를 반영하며 0.2초마다 계산된 응답을 보여줍니다.
다음 전달 함수의 계단 응답을 확인해 봅니다.
sys = zpk(-1,[-0.2+3j,-0.2-3j],1) * tf([1 1],[1 0.05])
sys =
(s+1)^2
----------------------------
(s+0.05) (s^2 + 0.4s + 9.04)
Continuous-time zero/pole/gain model.
Model Properties
step(sys)
기본적으로, step은 응답이 향하고 있는 정상 상태가 보이도록 종료 시간을 선택합니다. 하지만 이 시스템은 빠른 과도를 가지고 있으며 이러한 시간 스케일에서는 파악하기가 어렵습니다. 과도 응답을 자세히 살펴보기 위해 계단 플롯을 t = 15초로 제한합니다.
step(sys,15)


또는 시간이 일정한 간격으로 구분된 경우 계단 응답을 확인할 정확한 시간을 지정할 수 있습니다. 예를 들어 과도가 끝나는 시점부터 시스템이 정상 상태에 도달하는 시점까지의 응답을 살펴보겠습니다.
t = 20:0.2:120; step(sys,t)

이 플롯은 t = 20에서 시작하지만 step은 항상 t = 0에서 계단 입력을 적용합니다.
다음과 같은 2차 상태공간 모델이 있다고 가정하겠습니다.
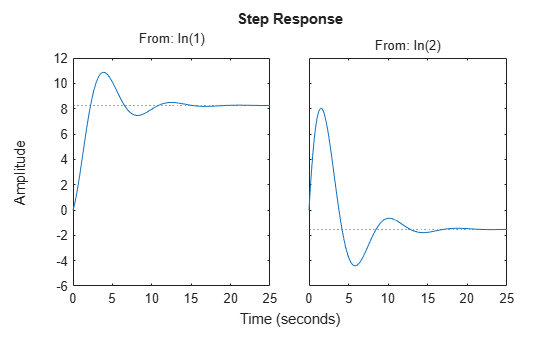
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
이 모델에는 2개의 입력과 1개의 출력이 있습니다. 따라서 2개의 채널(첫 번째 입력부터 출력까지, 두 번째 입력부터 출력까지)이 있습니다. 채널마다 각각의 계단 응답이 있습니다.
step을 사용하면 모든 채널의 응답이 계산됩니다.
step(sys)
왼쪽 플롯은 첫 번째 입력 채널의 계단 응답을 보여주고, 오른쪽 플롯은 두 번째 입력 채널의 계단 응답을 보여줍니다. MIMO 모델의 응답을 플로팅하기 위해 step을 사용할 때마다 모델의 모든 I/O 채널을 나타내는 플롯으로 구성된 배열이 생성됩니다. 예를 들어 5개의 상태, 3개의 입력, 2개의 출력이 있는 임의의 상태공간 모델을 만들고 이 모델의 계단 응답을 플로팅합니다.
sys = rss(5,2,3); step(sys)

MATLAB Figure 창에서, 플롯을 마우스 오른쪽 버튼으로 클릭하고 I/O 선택기를 선택하여 채널의 일부만 포함하도록 플롯을 제한할 수 있습니다.
step을 사용하면 여러 동적 시스템의 응답을 동일한 축에 플로팅할 수 있습니다. 예를 들어 PI 제어기를 가진 시스템과 PID 제어기를 가진 시스템의 폐루프 응답을 비교해 보겠습니다. 이 시스템의 전달 함수를 만들고 이 제어기들을 조정합니다.
H = tf(4,[1 2 10]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
폐루프 시스템을 형성하고 시스템의 계단 응답을 플로팅합니다.
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1); step(sys1,sys2) legend('PI','PID','Location','SouthEast')

기본적으로, step은 플로팅하는 각 시스템에 대해 다른 색을 선택합니다. LineSpec 입력 인수를 사용하여 색과 선 스타일을 지정할 수 있습니다.
step(sys1,'r--',sys2,'b') legend('PI','PID','Location','SouthEast')

첫 번째 LineSpec 'r--'는 PI 제어기 응답에 대해 빨간색 파선을 지정합니다. 두 번째 LineSpec 'b'는 PID 제어기 응답에 대해 파란색 실선을 지정합니다. 지정된 색과 선 스타일이 범례에 반영됩니다. 추가 플롯 사용자 지정 옵션이 필요하면 stepplot을 사용하십시오.
'Compare Responses of Multiple Systems' 예제에서는 여러 시스템의 응답을 하나의 축에 플로팅하는 방법을 보여줍니다. 모델 배열로 정렬된 여러 동적 시스템이 있는 경우 step은 시스템의 모든 응답을 한 번에 플로팅합니다.
모델 배열을 만듭니다. 이 예제에서는 서로 다른 고유 주파수를 가진 2차 전달 함수로 구성된 1차원 배열을 사용합니다. 먼저, 모델 배열에 대해 메모리를 사전할당합니다. 다음 명령은 영이득 SISO 전달 함수로 구성된 1×5 행을 만듭니다. 처음 두 차원은 모델 출력과 모델 입력을 나타냅니다. 나머지 차원은 배열 차원입니다.
sys = tf(zeros(1,1,1,5));
배열을 채웁니다.
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
(모델 배열에 대한 자세한 내용과 모델 배열을 만드는 방법은 Model Arrays 항목을 참조하십시오.) 배열에 있는 모든 모델의 계단 응답을 플로팅합니다.
step(sys)

step은 배열에 있는 모든 요소의 응답에 대해 동일한 선 스타일을 사용합니다. 요소를 구분하는 한 가지 방법은 동적 시스템 모델의 SamplingGrid 속성을 사용하여 배열의 각 요소를 대응하는 w0 값과 연결하는 것입니다.
sys.SamplingGrid = struct('frequency',w0);이제 MATLAB Figure 창에서 응답을 플로팅할 때, 각 응답선을 클릭하면 요소가 어떤 주파수 값에 대응하는지 확인할 수 있습니다.
출력 인수를 제공하면 step은 응답 데이터로 구성된 배열을 반환합니다. SISO 시스템의 경우, 응답 데이터는 응답이 샘플링된 시점 개수와 동일한 길이의 열 벡터로 반환됩니다. 시점으로 구성된 벡터 t를 제공하거나 step 함수가 시스템 동특성을 기반으로 시점을 정하도록 할 수 있습니다. 예를 들어 t = 0과 t = 5초 사이의 101개 시점에서 SISO 시스템의 계단 응답을 추출해 봅니다.
sys = tf(4,[1 2 10]); t = 0:0.05:5; y = step(sys,t); size(y)
ans = 1×2
101 1
MIMO 시스템의 경우, 응답 데이터는 N×Ny×Nu 차원의 배열로 반환됩니다. 여기서 Ny와 Nu는 동적 시스템의 출력 개수와 입력 개수입니다. 예를 들어 2-입력, 1-출력 시스템을 나타내는 다음과 같은 상태공간 모델이 있다고 가정하겠습니다.
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
t = 0과 t = 20초 사이의 200개 시점에서 이 시스템의 계단 응답을 추출합니다.
t = linspace(0,20,200); y = step(sys,t); size(y)
ans = 1×3
200 1 2
y(:,i,j)는 시간 t에서 j번째 입력에서 i번째 출력으로의 계단 응답을 포함하는 열 벡터입니다. 예를 들어 두 번째 입력에서 출력까지의 계단 응답을 추출해 보겠습니다.
y12 = y(:,1,2); plot(t,y12)

지연이 있는 피드백 루프를 만들고 이 피드백 루프의 계단 응답을 플로팅합니다.
s = tf('s');
G = exp(-s) * (0.8*s^2+s+2)/(s^2+s);
sys = feedback(ss(G),1);
step(sys)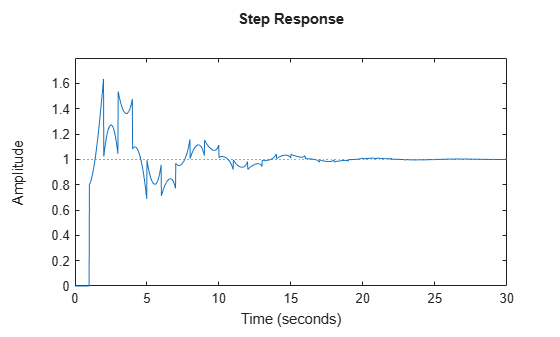
무질서한 시스템 계단 응답이 표시되어 있습니다. 내부 지연이 있는 시스템의 계단 응답에는 반복적인 비약과 같은 이상 동작이 나타날 수 있습니다. 이러한 동작은 시스템의 특징이며 소프트웨어 이상이 아닙니다.
기본적으로, step은 t = 0일 때 0에서 1로 변하는 입력 신호를 적용합니다. 진폭과 편향을 사용자 지정하기 위해 RespConfig를 사용합니다. 예를 들어 t = 0일 때 1에서 –1로 변하는 신호에 대한 SISO 상태공간 모델의 응답을 계산해 보겠습니다.
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;
sys = ss(A,B,C,D,0.2);
opt = RespConfig;
opt.Bias = 1;
opt.Amplitude = -2;
step(sys,opt)
임의의 입력 신호에 대한 응답에는 lsim을 사용합니다.
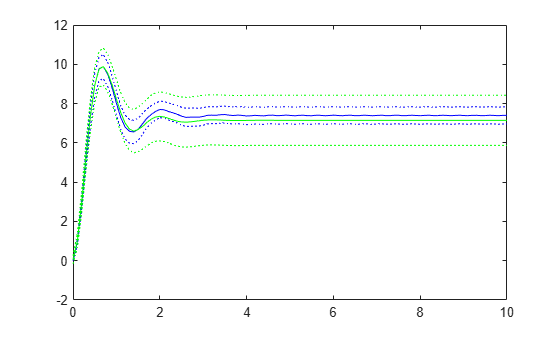
식별된 모수적 모델의 계단 응답을 비모수적(경험적) 모델과 비교합니다. 또한 두 모델의 3 신뢰영역을 표시합니다.
데이터를 불러옵니다.
load iddata1 z1
모수적 모델을 추정합니다.
sys1 = ssest(z1,4);
비모수적 모델을 추정합니다.
sys2 = impulseest(z1);
비교를 위해 계단 응답을 플로팅합니다.
t = (0:0.1:10)'; [y1, ~, ~, ysd1] = step(sys1,t); [y2, ~, ~, ysd2] = step(sys2,t); plot(t, y1, 'b', t, y1+3*ysd1, 'b:', t, y1-3*ysd1, 'b:') hold on plot(t, y2, 'g', t, y2+3*ysd2, 'g:', t, y2-3*ysd2, 'g:')
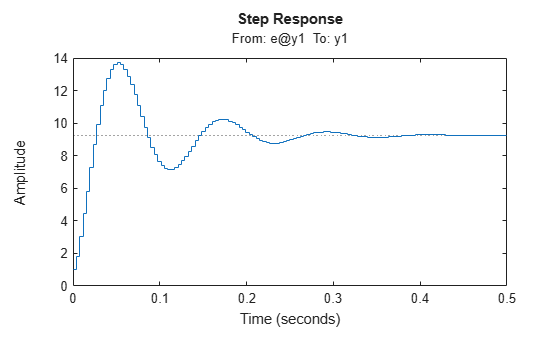
식별된 시계열 모델의 계단 응답을 계산합니다.
신호 모델이라고도 하는 시계열 모델은 측정된 입력 신호가 없는 모델입니다. 이 모델의 계단 플롯은 (측정되지 않은) 잡음 채널을 계단 신호를 적용할 입력 채널로 사용합니다.
데이터를 불러옵니다.
load iddata9;시계열 모델을 추정합니다.
sys = ar(z9, 4);
sys는 A y(t) = e(t) 형식의 모델입니다. 여기서 e(t)는 잡음 채널을 나타냅니다. 계단 응답 계산에서 e(t)는 입력 채널로 처리되며 이름이 e@y1로 지정됩니다.
계단 응답을 플로팅합니다.
step(sys)
선형 모델과 비선형 모델의 작은 진폭 계단 응답을 비교하여 비선형 ARX 모델의 선형화를 검증합니다.
데이터를 불러옵니다.
load iddata2 z2;
비선형 ARX 모델을 추정합니다.
nlsys = nlarx(z2,[4 3 10],idTreePartition,'custom',... {'sin(y1(t-2)*u1(t))+y1(t-2)*u1(t)+u1(t).*u1(t-13)',... 'y1(t-5)*y1(t-5)*y1(t-1)'},'nlr',[1:5, 7 9]);
정상 상태 입력값 1에 대응하는 nlsys의 평형 동작점을 파악합니다.
u0 = 1;
[X,~,r] = findop(nlsys, 'steady', 1);
y0 = r.SignalLevels.Output;이 동작점에서 nlsys의 선형 근사를 구합니다.
sys = linearize(nlsys,u0,X);
sys의 유용성을 검증하기 위해 sys의 작은 진폭 계단 응답을 nlsys의 작은 진폭 계단 응답과 비교합니다.
비선형 시스템 nlsys는 (u0,y0)으로 정해지는 평형 레벨에서 동작하고 있습니다. 이 정상 상태에 대해 크기가 0.1인 계단 섭동을 발생시키고 대응하는 응답을 계산합니다.
opt = RespConfig; opt.InputOffset = u0; opt.Amplitude = 0.1; t = (0:0.1:10)'; ynl = step(nlsys, t, opt);
선형 시스템 sys는 입력의 섭동과 출력의 대응하는 섭동 간의 관계를 표현합니다. 그리고 비선형 시스템의 평형 값을 인식하지 못합니다.
선형 시스템의 계단 응답을 플로팅합니다.
opt = RespConfig; opt.Amplitude = 0.1; yl = step(sys, t, opt);
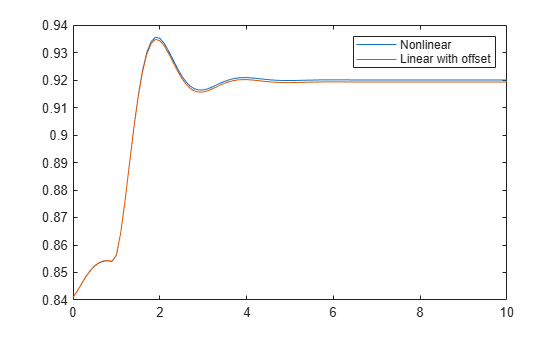
정상 상태 오프셋 y0을 선형 시스템의 응답에 더하고 응답을 플로팅합니다.
plot(t, ynl, t, yl+y0) legend('Nonlinear', 'Linear with offset')
LPV(lpvss) 모델의 계단 응답을 계산하고 플로팅합니다. 이 예제에서는 fcnMaglev.m에 정의된 공중에 뜨는 공 모델의 외란 에 대한 폐루프 계단 응답을 시뮬레이션합니다.

모델을 만들고 이산화합니다.
hmin = 0.05; hmax = 0.25; h0 = (hmin+hmax)/2; Ts = 0.01; Glpv = lpvss("h",@fcnMaglev,0,0,h0); Glpvd = c2d(Glpv,Ts,"tustin");
3개의 높이 값에 대해 LPV 모델을 샘플링하고 PID 제어기를 조정합니다.
hpid = linspace(hmin,hmax,3);
[Ga,Goffset] = sample(Glpvd,[],hpid);
wc = 50;
Ka = pidtune(Ga,"pidf",wc);
Ka.Tf = 0.01;이득 스케줄링이 적용된 PID 제어기를 만듭니다.
Ka.SamplingGrid = struct("h",hpid); Koffset = struct("y",{Goffset.u}); Clpv = ssInterpolant(ss(Ka),Koffset);
폐루프 모델을 만듭니다.
CL = feedback(Glpvd*[1,Clpv],1,2,1);
CL.InputName = {'du';'href'};
CL.OutputName = "h";= 에 대해 정상 상태 전류를 구하여 플랜트 입력에서의 계단 외란에 대한 적절한 크기를 계산합니다.
[~,~,~,~,~,~,~,u0] = Glpv.DataFunction(0,h0);
입력 외란과 참조 값의 계단 변동에 대한 응답을 계산하고 플로팅합니다. 기준 입력 신호 = 0과 = 을 설정하여 시작 정상 상태 조건을 지정합니다.
t = 0:Ts:2; pFcn = @(k,x,u) x(1); Config = RespConfig( ... Bias=[0;h0], ... Amplitude=0.2*[u0;h0]*Ts, ... Delay=0.5, ... InitialParameter=h0); step(CL,t,pFcn,Config) title("Current Step Disturbance and Height Step Change")

복소 계수를 갖는 상태공간 모델을 만듭니다.
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
시스템의 계단 응답을 계산합니다.
[y,t] = step(sys);
결과로 얻은 응답 데이터에 복소수 출력값이 포함되어 있습니다.
y
R2026a 이후
이 예시는 내부 지연이 있는 모델을 시뮬레이션할 때 샘플링 시간을 변화시켜 검증하는 것이 필요한 이유를 보여줍니다.
모델을 불러옵니다.
load idelayModel.mat
sys.InternalDelayans = 0.5166
sys의 안정성 여유를 구합니다. allmargin은 폐루프 응답이 불안정해야 함을 나타냅니다.
s = allmargin(sys)
s = struct with fields:
GainMargin: [1.3867 0.9727 10.6798 20.1934 29.4912 38.7266 47.9352 57.1304 66.3172 75.4988 84.6770 93.8527 103.0266 112.1991 121.3705 130.5412 139.7111 148.8805 158.0495 167.2181 176.3864 185.5544 194.7221 203.8897 213.0571 222.2243 … ] (1×49 double)
GMFrequency: [0.0467 5.0880 15.2373 27.3818 39.5403 51.7014 63.8635 76.0266 88.1895 100.3526 112.5158 124.6791 136.8424 149.0058 161.1692 173.3326 185.4960 197.6594 209.8229 221.9864 234.1499 246.3134 258.4768 270.6404 282.8039 … ] (1×49 double)
PhaseMargin: [36.6926 -142.9664 113.4224 37.7140 -6.4674]
PMFrequency: [0.0250 0.2899 0.8836 4.8597 5.1320]
DelayMargin: [25.6083 13.0665 2.2403 0.1354 -0.0220]
DMFrequency: [0.0250 0.2899 0.8836 4.8597 5.1320]
Stable: 0
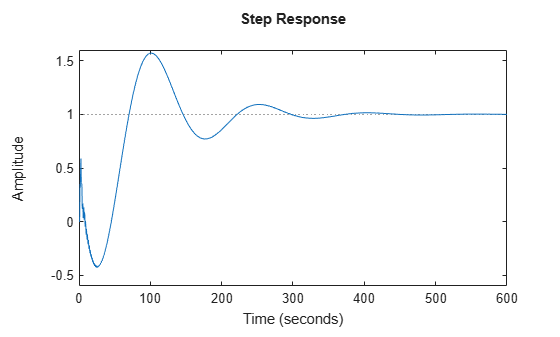
디폴트 스텝 크기로 폐루프 응답을 시뮬레이션하면 응답이 안정적으로 보입니다.
cl = feedback(sys,1); figure step(cl)
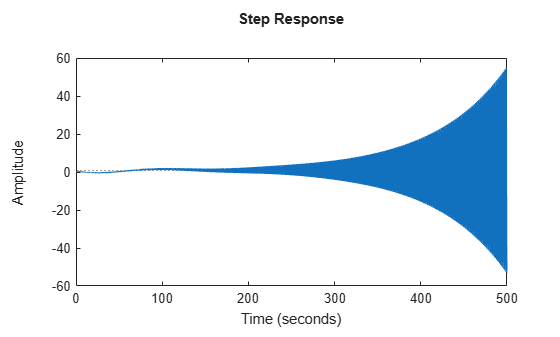
그러나 스텝 크기를 줄이면 응답에서 불안정성이 드러납니다.
figure step(cl,0:1e-2:500)
선택된 시간 스텝 크기가 충분히 작은지 판단하기 위해, 스텝 크기를 달리하면서 연속 모델과 이산화 모델의 주파수 응답을 비교할 수 있습니다.
sysd1_cl = c2d(cl,0.4,'zoh');Warning: Discretization is only approximate due to internal delays. Use faster sampling rate if discretization error is large.
sysd2_cl = c2d(cl,0.01,'zoh');Warning: Discretization is only approximate due to internal delays. Use faster sampling rate if discretization error is large.
figure bodeplot(cl,sysd1_cl,sysd2_cl) legend("Continuous","Discrete (Ts = 0.4)","Discrete (Ts = 0.01)")
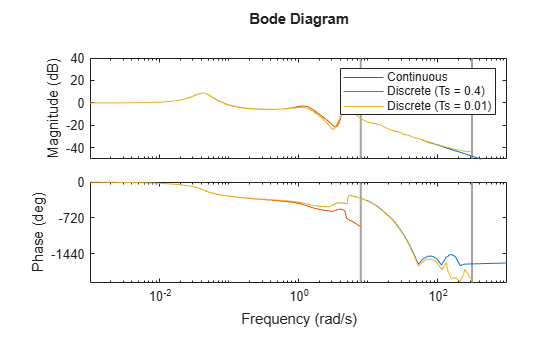
더 느린 샘플링은 공진을 완전히 포착하지 못합니다. 내부 지연이 있는 모델의 시뮬레이션은 근사적 이산화에 기반하므로, 선택한 스텝 크기가 충분히 작은지 주파수 영역에서 연속 응답과 이산 응답을 비교하여 검증해야 합니다.
입력 인수
출력 인수
팁
알고리즘
내부 지연이 없는 연속시간 모델의 샘플을 얻기 위해 step은 이러한 모델을 상태공간 모델로 변환하고 입력에 영차 유지를 사용하여 이 변환된 모델을 이산화합니다. 입력 시간 벡터 t를 t = T0:dt:Tf 형식으로 제공한 경우를 제외하고, step은 시스템 동특성을 기반으로 이러한 이산화에 대한 샘플링 시간을 자동으로 선택합니다. 이 경우 step은 dt를 샘플링 시간으로 사용합니다. 결과로 생성되는 시뮬레이션 시간 스텝 tOut은 dt 간격으로 일정하게 샘플링됩니다.
내부 지연이 있는 시스템의 경우, Control System Toolbox™ 소프트웨어는 근사적 c2d 이산화를 기반으로 한 시뮬레이션을 사용합니다. 시뮬레이션의 정확도는 샘플링 시간이 줄어들수록 향상됩니다. 예제는 Validate Simulation Results for Models with Internal Delays 항목을 참조하십시오. (R2026a 이후)
참고 문헌
[1] L.F. Shampine and P. Gahinet, "Delay-differential-algebraic equations in control theory," Applied Numerical Mathematics, Vol. 56, Issues 3–4, pp. 574–588.