rlocus
동적 시스템의 근궤적
설명
rlocus(___)는 위에 열거된 모든 입력 인수의 조합에 디폴트 플로팅 옵션을 사용하여 SISO 모델 sys의 근궤적을 플로팅합니다. 추가 플롯 사용자 지정 옵션이 필요하면 rlocusplot을 사용하십시오.
여러 동적 시스템의 근궤적을 동일한 플롯에 플로팅하기 위해
sys를 쉼표로 구분된 모델 목록으로 지정할 수 있습니다. 예를 들어,rlocus(sys1,sys2,sys3)은 세 모델의 근궤적을 동일한 플롯에 플로팅합니다.플롯에 있는 각 시스템의 색, 선 스타일 및 마커를 지정하려면 각 시스템의
LineSpec값을 지정합니다. 예를 들어,rlocus(sys1,LineSpec1,sys2,LineSpec2)는 두 모델을 플로팅하고 각각의 플롯 스타일을 지정합니다.LineSpec값 지정에 대한 자세한 내용은rlocusplot항목을 참조하십시오.
예제
이 예제에서는 다음 SISO 동적 시스템의 근궤적을 플로팅합니다.
sys = tf([2 5 1],[1 2 3]); rlocus(sys)
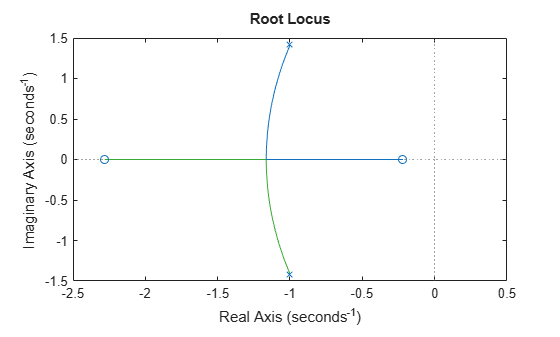
근궤적 플롯에서 시스템의 극점은 x로 표시되고 영점은 o로 표시됩니다. 생성된 근궤적 플롯 내에서 메뉴를 사용하여 그리드 선을 추가하고 확대/축소할 수 있으며 속성 편집기를 호출하여 플롯을 사용자 지정할 수도 있습니다.
추가 플롯 사용자 지정 옵션이 필요하면 rlocusplot을 참조하십시오.
이 예제에서는 다음 세 개의 SISO 모델이 있는 sisoModels.mat를 살펴보겠습니다.
sys1전달 함수 모델sys2상태공간 모델sys3영점-극점-이득 모델
mat 파일에서 모델을 불러옵니다.
load('sisoModels.mat','sys1','sys2','sys3');
rlocus를 사용하여 근궤적 플롯을 만들고 각 시스템에 대한 색을 지정합니다. 근궤적 플롯에 범례도 추가합니다.
rlocus(sys1,'b',sys2,'k',sys3,'r') hold on legend('sys1','sys2','sys3') hold off

세 개의 시스템에 대한 근궤적 다이어그램이 하나의 플롯에 포함되어 있습니다. 플롯 사용자 지정에 대한 자세한 내용은 rlocusplot을 참조하십시오.
이 예제에서는 다음과 같은 SISO 전달 함수 모델이 있다고 가정하겠습니다.
rlocus에 위 전달 함수 모델을 사용하여 폐루프 극점과 관련 피드백 이득 값을 추출합니다.
sys = tf([3 0 1],[9 7 5 6]); [r,k] = rlocus(sys)
r = 3×53 complex
102 ×
-0.0094 + 0.0000i -0.0104 + 0.0000i -0.0105 + 0.0000i -0.0106 + 0.0000i -0.0107 + 0.0000i -0.0108 + 0.0000i -0.0109 + 0.0000i -0.0111 + 0.0000i -0.0112 + 0.0000i -0.0113 + 0.0000i -0.0115 + 0.0000i -0.0117 + 0.0000i -0.0119 + 0.0000i -0.0121 + 0.0000i -0.0124 + 0.0000i -0.0126 + 0.0000i -0.0129 + 0.0000i -0.0132 + 0.0000i -0.0135 + 0.0000i -0.0139 + 0.0000i -0.0143 + 0.0000i -0.0148 + 0.0000i -0.0152 + 0.0000i -0.0158 + 0.0000i -0.0163 + 0.0000i -0.0170 + 0.0000i -0.0177 + 0.0000i -0.0184 + 0.0000i -0.0192 + 0.0000i -0.0201 + 0.0000i -0.0211 + 0.0000i -0.0222 + 0.0000i -0.0233 + 0.0000i -0.0246 + 0.0000i -0.0259 + 0.0000i -0.0274 + 0.0000i -0.0290 + 0.0000i -0.0307 + 0.0000i -0.0326 + 0.0000i -0.0346 + 0.0000i -0.0368 + 0.0000i -0.0392 + 0.0000i -0.0418 + 0.0000i -0.0446 + 0.0000i -0.0476 + 0.0000i -0.0508 + 0.0000i -0.0543 + 0.0000i -0.0582 + 0.0000i -0.0623 + 0.0000i -0.0667 + 0.0000i
0.0008 + 0.0084i 0.0006 + 0.0083i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0081i 0.0005 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0080i 0.0004 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0079i 0.0002 + 0.0079i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0001 + 0.0077i 0.0001 + 0.0077i 0.0001 + 0.0076i 0.0000 + 0.0076i 0.0000 + 0.0075i -0.0000 + 0.0074i -0.0000 + 0.0074i -0.0000 + 0.0073i -0.0001 + 0.0073i -0.0001 + 0.0072i -0.0001 + 0.0071i -0.0001 + 0.0071i -0.0001 + 0.0070i -0.0001 + 0.0070i -0.0001 + 0.0069i -0.0001 + 0.0068i -0.0001 + 0.0068i -0.0001 + 0.0067i -0.0001 + 0.0067i -0.0001 + 0.0066i -0.0001 + 0.0066i -0.0001 + 0.0065i -0.0001 + 0.0065i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0063i -0.0001 + 0.0063i
0.0008 - 0.0084i 0.0006 - 0.0083i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0081i 0.0005 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0080i 0.0004 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0079i 0.0002 - 0.0079i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0001 - 0.0077i 0.0001 - 0.0077i 0.0001 - 0.0076i 0.0000 - 0.0076i 0.0000 - 0.0075i -0.0000 - 0.0074i -0.0000 - 0.0074i -0.0000 - 0.0073i -0.0001 - 0.0073i -0.0001 - 0.0072i -0.0001 - 0.0071i -0.0001 - 0.0071i -0.0001 - 0.0070i -0.0001 - 0.0070i -0.0001 - 0.0069i -0.0001 - 0.0068i -0.0001 - 0.0068i -0.0001 - 0.0067i -0.0001 - 0.0067i -0.0001 - 0.0066i -0.0001 - 0.0066i -0.0001 - 0.0065i -0.0001 - 0.0065i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0063i -0.0001 - 0.0063i
k = 1×53
0 0.4201 0.4542 0.4911 0.5309 0.5740 0.6205 0.6709 0.7253 0.7841 0.8477 0.9165 0.9908 1.0712 1.1581 1.2521 1.3536 1.4634 1.5822 1.7105 1.8493 1.9993 2.1614 2.3368 2.5263 2.7313 2.9529 3.1924 3.4514 3.7313 4.0340 4.3613 4.7151 5.0975 5.5111 5.9581 6.4415 6.9640 7.5289 8.1397 8.8000 9.5138 10.2856 11.1200 12.0220 12.9973 14.0516 15.1915 16.4238 17.7561
sys에 3개의 극점이 있으므로 결과로 생기는 극점 r로 구성된 배열의 크기는 3x53입니다. r의 각 열은 벡터 k의 이득 값에 해당합니다. 이 예제의 경우 rlocus는 k 값 53개를 0에서 무한대까지 자동으로 선택하여 세 개의 폐루프 극점에 대해 매끄러운 궤적을 구합니다.
display(r(:,39))
-3.2585 + 0.0000i -0.0145 + 0.6791i -0.0145 - 0.6791i
display(k(39))
7.5289
예를 들어 r(:,39)는 피드백 이득 값 7.5289에 대해 위의 폐루프 극점을 포함합니다.
이 예제에서는 다음과 같은 SISO 전달 함수 모델이 있다고 가정하겠습니다.
전달 함수 모델과 피드백 이득 값으로 구성된 벡터를 정의합니다. 이 예제에서는 이득 값이 1에서 8 사이에서 0.5씩 증가한다고 가정하고 rlocus를 사용하여 폐루프 극점 위치를 추출해 보겠습니다.
sys = tf([0.5 0 -1],[4 0 3 0 2]); k = (1:0.5:5); r = rlocus(sys,k); size(r)
ans = 1×2
4 9
sys에 4개의 폐루프 극점이 있으므로 결과로 생기는 폐루프 극점 위치로 구성된 배열 r의 크기는 4x9이며 여기서 9개의 열은 k에 정의된 9개의 특정 이득 값에 해당합니다.
k의 특정 이득 값에 대한 폐루프 극점의 궤적을 근궤적 플롯에 시각화할 수도 있습니다.
rlocus(sys,k)

입력 인수
출력 인수
팁
대화형 방식으로 근궤적을 플로팅하는 방법은 제어 시스템 디자이너를 참조하십시오.
근궤적 플롯의 모양을 사용자 지정하는 추가 옵션이 필요한 경우
rlocusplot을 사용하십시오.rlocus를 사용하여 생성된 플롯은 string형 배열이나 문자형 벡터로 구성된 셀형 배열을 사용해서 여러 줄로 된 제목이나 레이블을 지정하는 것을 지원하지 않습니다. 여러 줄로 된 제목과 레이블을 지정하려면newline문자가 포함된 단일 문자열을 사용하십시오.rlocus(sys) title("first line" + newline + "second line");
알고리즘
동적 시스템의 근궤적은 폐루프 극점 궤적을 (음의 피드백을 가정하여) 피드백 이득 k의 함수로 포함합니다. 근궤적은 폐루프 극점 위치에 변화하는 피드백 이득이 미치는 영향을 연구하는 데 사용됩니다. 또한, 이들 위치는 시간 및 주파수 응답에 대한 간접적인 정보를 제공합니다.
rlocus를 사용하여 아래 그림과 같이 sys를 설정하여 다음 음의 피드백 루프의 근궤적 다이어그램을 계산할 수 있습니다.

예를 들어 sys가 다음과 같이 표현되는 전달 함수인 경우
폐루프 극점은 다음의 근입니다.
근궤적 플롯은 피드백 이득 k가 0에서 무한대일 때 폐루프 극점의 궤적을 그립니다.