이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
pidtune
선형 플랜트 모델에 대한 PID 조정 알고리즘
구문
설명
C = pidtune(___,opts)opts를 지정하려면 pidtuneOptions를 사용하십시오.
예제
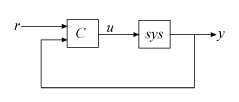
이 예제에서는 다음의 식으로 주어진 플랜트에 대한 PID 제어기를 설계하는 방법을 보여줍니다.
첫 번째 단계로 플랜트 모델을 만들고 이 모델에 대한 간단한 PI 제어기를 설계합니다.
sys = zpk([],[-1 -1 -1],1);
[C_pi,info] = pidtune(sys,'PI')C_pi =
1
Kp + Ki * ---
s
with Kp = 1.14, Ki = 0.454
Continuous-time PI controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 0.5205
PhaseMargin: 60.0000
C_pi는 PI 제어기를 나타내는 pid 제어기 객체입니다. info 필드는 조정 알고리즘이 약 0.52rad/s의 개루프 교차 주파수를 선택함을 보여줍니다.
제어되는 시스템의 폐루트 계단 응답(기준 추종)을 검토합니다.
T_pi = feedback(C_pi*sys, 1); step(T_pi)
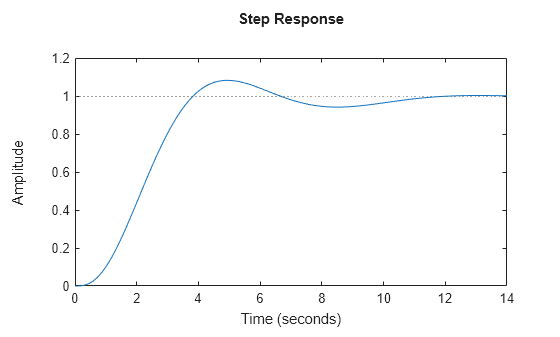
응답 시간을 개선하기 위해 목표 교차 주파수를 pidtune이 자동으로 선택하는 결과인 0.52보다 높게 설정할 수 있습니다. 교차 주파수를 1.0으로 높입니다.
[C_pi_fast,info] = pidtune(sys,'PI',1.0)C_pi_fast =
1
Kp + Ki * ---
s
with Kp = 2.83, Ki = 0.0495
Continuous-time PI controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 1
PhaseMargin: 43.9973
새 제어기가 더 높은 교차 주파수에 도달하지만 위상 여유는 감소합니다.
두 제어기를 사용하여 폐루프 계단 응답을 비교합니다.
T_pi_fast = feedback(C_pi_fast*sys,1); step(T_pi,T_pi_fast) axis([0 30 0 1.4]) legend('PI','PI,fast')
PI 제어기가 1.0rad/s의 교차 주파수에서 양호한 위상 여유에 도달하기에 충분한 자유도를 갖지 못하기 때문에 이와 같은 성능 저하가 발생합니다. 미분 동작을 추가하면 응답이 개선됩니다.
1.0rad/s의 목표 교차 주파수를 사용하여 Gc에 대한 PIDF 제어기를 설계합니다.
[C_pidf_fast,info] = pidtune(sys,'PIDF',1.0)C_pidf_fast =
1 s
Kp + Ki * --- + Kd * --------
s Tf*s+1
with Kp = 2.72, Ki = 0.985, Kd = 1.72, Tf = 0.00875
Continuous-time PIDF controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 1
PhaseMargin: 60.0000
info 필드는 제어기의 미분 동작을 통해 조정 알고리즘이 양호한 위상 여유로 목표 교차 주파수에 도달하는 더욱 공격적인 제어기를 설계할 수 있음을 보여줍니다.
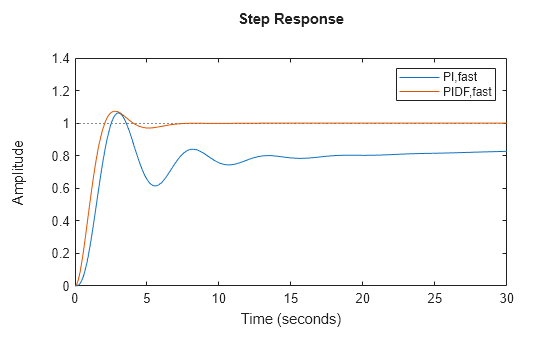
빠른 PI 제어기와 빠른 PIDF 제어기에서 폐루프 계단 응답 및 외란 제거를 비교합니다.
T_pidf_fast = feedback(C_pidf_fast*sys,1); step(T_pi_fast, T_pidf_fast); axis([0 30 0 1.4]); legend('PI,fast','PIDF,fast');
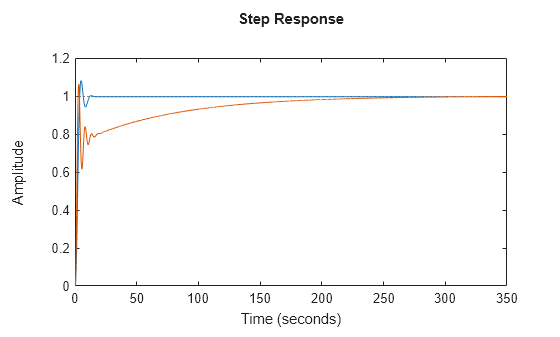
빠른 PI 제어기와 빠른 PIDF 제어기에서 시스템의 입력(부하) 외란 제거를 비교할 수 있습니다. 이를 위해 플랜트 입력에서 플랜트 출력으로의 폐루프 전달 함수의 응답을 플로팅합니다.
S_pi_fast = feedback(sys,C_pi_fast); S_pidf_fast = feedback(sys,C_pidf_fast); step(S_pi_fast,S_pidf_fast); axis([0 50 0 0.4]); legend('PI,fast','PIDF,fast');
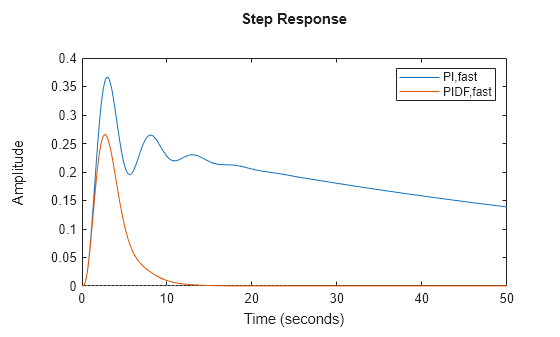
이 플롯은 이번에도 역시 PIDF 제어기가 더 빠른 외란 제거 성능을 제공함을 보여줍니다.
다음 플랜트를 위한 표준 형식의 PID 제어기를 설계합니다.
표준 형식으로 제어기를 설계하려면 표준 형식 제어기를 pidtune의 C0 인수로 사용하십시오.
sys = zpk([],[-1 -1 -1],1); C0 = pidstd(1,1,1); C = pidtune(sys,C0)
C =
1 1
Kp * (1 + ---- * --- + Td * s)
Ti s
with Kp = 2.18, Ti = 2.57, Td = 0.642
Continuous-time PID controller in standard form
Model Properties
적분기 이산화를 위해 지정된 방법으로 이산시간 PI 제어기를 설계합니다.
플랜트가 이산시간에 있는 경우 pidtune은 디폴트 순방향 오일러 적분 방법을 사용하여 자동으로 이산시간 제어기를 반환합니다. 다른 적분 방법을 지정하려면 pid 또는 pidstd를 사용하여 원하는 적분 방법을 갖는 이산시간 제어기를 만드십시오.
sys = c2d(tf([1 1],[1 5 6]),0.1); C0 = pid(1,1,'Ts',0.1,'IFormula','BackwardEuler'); C = pidtune(sys,C0)
C =
Ts*z
Kp + Ki * ------
z-1
with Kp = -0.0658, Ki = 1.32, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time PI controller in parallel form.
Model Properties
C0을 입력값으로 사용하면 pidtune이 C0과 동일한 형식, 유형, 이산화 방법을 갖는 제어기 C를 설계합니다. C의 적분항에 역방향 오일러 적분 방법이 사용됨을 알 수 있습니다.
사다리꼴 적분기를 지정하고 그 결과로 생성되는 제어기를 비교합니다.
C0_tr = pid(1,1,'Ts',0.1,'IFormula','Trapezoidal'); Ctr = pidtune(sys,C0_tr)
Ctr =
Ts*(z+1)
Ki * --------
2*(z-1)
with Ki = 1.32, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time I-only controller.
Model Properties
다음의 전달 함수로 주어진 플랜트를 위한 2-DOF PID 제어기를 설계합니다.
목표 대역폭으로 1.5rad/s를 사용합니다.
wc = 1.5;
G = tf(1,[1 0.5 0.1]);
C2 = pidtune(G,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 1.26, Ki = 0.255, Kd = 1.38, b = 0.665, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
'PID2' 유형을 사용하면 pidtune이 pid2 객체로 표현되는 2-DOF 제어기를 생성하게 됩니다. 이 결과가 표시되는 것을 확인할 수 있습니다. pidtune이 설정점 가중치 b, c를 포함해 모든 제어기 계수를 조정하여 성능과 강인성의 균형을 맞추는 것도 표시됩니다.
입력 인수
출력 인수
팁
기본적으로
pidtune에type입력을 사용하면 병렬 형식의pid제어기가 반환됩니다. 표준 형식으로 제어기를 설계하려면pidstd제어기를 입력 인수C0으로 사용하십시오. 병렬 및 표준 제어기 형식에 대한 자세한 내용은pid및pidstd도움말 페이지를 참조하십시오.라이브 편집기에서의 대화형 방식 PID 조정에 대한 자세한 내용은 PID 제어기 조정 라이브 편집기 작업을 참조하십시오. 이 작업은 대화형 방식으로 PID 제어기를 설계할 수 있도록 해주며 라이브 스크립트에 대한 MATLAB® 코드를 자동으로 생성해 줍니다.
알고리즘
MathWorks® PID 조정 알고리즘에 대한 자세한 내용은 PID 조정 알고리즘 항목을 참조하십시오.
대체 기능
라이브 편집기에서의 대화형 방식 PID 조정에 대한 자세한 내용은 PID 제어기 조정 라이브 편집기 작업을 참조하십시오. 이 작업은 대화형 방식으로 PID 제어기를 설계할 수 있도록 해주며 라이브 스크립트에 대한 MATLAB 코드를 자동으로 생성해 줍니다. 예제는 PID Controller Design in the Live Editor 항목을 참조하십시오.
독립 실행형 앱에서 대화형 방식으로 PID 조정을 수행하려면 PID 조정기를 사용하십시오. 앱을 사용한 제어기 설계에 대한 예제는 빠른 기준 추종을 위한 PID 제어기 설계 항목을 참조하십시오.
참고 문헌
[1] Åström, Karl J., and Tore Hägglund. Advanced PID Control. Research Triangle Park, NC: ISA-The Instrumentation, Systems, and Automation Society, 2006.
버전 내역
R2010b에 개발됨