frd
주파수 응답 데이터 모델
설명
frd를 사용하여, 실수 값 또는 복소수 값을 갖는 주파수 응답 데이터 모델을 만들거나 동적 시스템 모델을 주파수 응답 데이터 모델 형식으로 변환합니다.
주파수 응답 데이터 모델은 복소수 주파수 응답 데이터를 그에 대응하는 주파수 지점과 함께 저장합니다. 예를 들어 주파수 응답 데이터 모델 H(jwi)는 각 입력 주파수 wi에서의 주파수 응답을 저장합니다. 여기서 i = 1,…,n입니다. frd 모델 객체는 연속시간 또는 이산시간에서 SISO 또는 MIMO 주파수 응답 데이터 모델을 표현할 수 있습니다. 자세한 내용은 Frequency Response Data (FRD) Models 항목을 참조하십시오.
frd를 사용하여 일반화된 주파수 응답 데이터(genfrd) 모델을 만들 수도 있습니다.
생성
frd 모델은 다음 방법 중 하나로 얻을 수 있습니다.
frd명령을 사용하여 주파수 응답 데이터에서 모델을 만듭니다. 예를 들어, 특정 주파수에서 가져온 주파수 응답 데이터를 사용하여frd모델을 만들 수 있습니다.예제는 SISO 주파수 응답 데이터 모델 항목을 참조하십시오.
지정된 주파수에서의 모델 주파수 응답을 계산하여
ss모델 같은 선형 모델을frd모델로 변환합니다.예제는 상태공간 모델을 주파수 응답 데이터 모델로 변환하기 항목을 참조하십시오.
오프라인 주파수 응답 추정 워크플로를 사용하여 모델을 추정합니다. 이러한 워크플로에는 Simulink® Control Design™이 필요합니다.
자세한 내용은 Estimate Frequency Response at the Command Line (Simulink Control Design) 항목과 Estimate Frequency Response Using Model Linearizer (Simulink Control Design) 항목을 참조하십시오.
구문
설명
sys = frd(___,Name,Value)
입력 인수
속성
객체 함수
다음 목록은 일부이기는 하나 frd 모델과 함께 사용할 수 있는 대표적인 함수들입니다. 일반적으로, 동적 시스템 모델에 적용되는 많은 함수가 frd 객체에도 적용됩니다. frd 모델은 시간 영역 분석 함수와는 동작하지 않습니다.
예제
주파수 응답 데이터에서 frd 객체를 만듭니다.
이 예제에서는 물탱크 모델과 관련해 수집된 주파수 응답 데이터를 불러옵니다.
load wtankData.mat이 데이터에는 rad/s부터 rad/s까지의 주파수 범위에서 수집된 주파수 응답 데이터가 들어 있습니다.
모델을 생성합니다.
sys = frd(response,frequency)
sys =
Frequency(rad/s) Response
---------------- --------
0.0010 1.562e+01 - 1.9904i
0.0018 1.560e+01 - 2.0947i
0.0034 1.513e+01 - 3.3670i
0.0062 1.373e+01 - 5.4306i
0.0113 1.047e+01 - 7.5227i
0.0207 5.829e+00 - 7.6529i
0.0379 2.340e+00 - 5.6271i
0.0695 7.765e-01 - 3.4188i
0.1274 2.394e-01 - 1.9295i
0.2336 7.216e-02 - 1.0648i
0.4281 2.157e-02 - 0.5834i
0.7848 6.433e-03 - 0.3188i
1.4384 1.916e-03 - 0.1740i
2.6367 5.705e-04 - 0.0950i
4.8329 1.698e-04 - 0.0518i
8.8587 5.055e-05 - 0.0283i
16.2378 1.505e-05 - 0.0154i
29.7635 4.478e-06 - 0.0084i
54.5559 1.333e-06 - 0.0046i
100.0000 3.967e-07 - 0.0025i
Continuous-time frequency response.
Model Properties
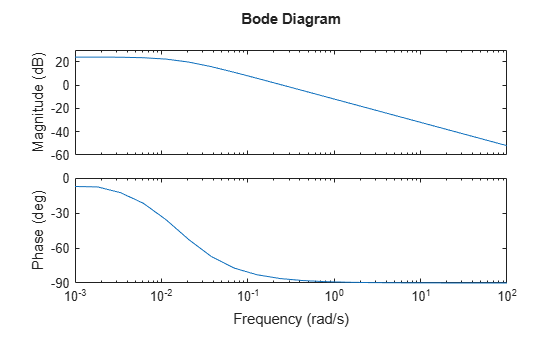
sys를 플로팅합니다.
bode(sys)
이 예제에서는 무작위로 생성된 응답 데이터와 주파수가 있다고 가정하겠습니다.
3×2×7 복소수 배열과, 0.01rad/s와 100rad/s 사이의 7개 점을 갖는 주파수 벡터를 생성합니다. 샘플 시간 Ts를 5초로 설정합니다.
rng(0) r = randn(3,2,7)+1i*randn(3,2,7); w = logspace(-2,2,7); Ts = 5;
모델을 생성합니다.
sys = frd(r,w,Ts)
sys =
From input 1 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.5377 + 0.3192i 1.8339 + 0.3129i -2.2588 - 0.8649i
0.0464 -0.4336 + 1.0933i 0.3426 + 1.1093i 3.5784 - 0.8637i
0.2154 0.7254 - 0.0068i -0.0631 + 1.5326i 0.7147 - 0.7697i
1.0000 1.4090 - 1.0891i 1.4172 + 0.0326i 0.6715 + 0.5525i
4.6416 0.4889 - 1.4916i 1.0347 - 0.7423i 0.7269 - 1.0616i
21.5443 0.8884 - 0.1924i -1.1471 + 0.8886i -1.0689 - 0.7648i
100.0000 0.3252 - 0.1774i -0.7549 - 0.1961i 1.3703 + 1.4193i
From input 2 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.8622 - 0.0301i 0.3188 - 0.1649i -1.3077 + 0.6277i
0.0464 2.7694 + 0.0774i -1.3499 - 1.2141i 3.0349 - 1.1135i
0.2154 -0.2050 + 0.3714i -0.1241 - 0.2256i 1.4897 + 1.1174i
1.0000 -1.2075 + 1.1006i 0.7172 + 1.5442i 1.6302 + 0.0859i
4.6416 -0.3034 + 2.3505i 0.2939 - 0.6156i -0.7873 + 0.7481i
21.5443 -0.8095 - 1.4023i -2.9443 - 1.4224i 1.4384 + 0.4882i
100.0000 -1.7115 + 0.2916i -0.1022 + 0.1978i -0.2414 + 1.5877i
Sample time: 5 seconds
Discrete-time frequency response.
Model Properties
지정된 데이터로 2-입력, 3-출력 frd 모델이 생성됩니다.
이 예제에서는 전달 함수 모델에서 상속한 속성을 갖는 주파수 응답 데이터 모델을 만듭니다.
TimeUnit 속성이 'minutes'로, InputDelay 속성이 3으로 설정된 전달 함수 sys1을 만듭니다.
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputDelay',3)
sys1 =
2 s
exp(-3*s) * ---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = {sys1.TimeUnit,sys1.InputDelay}propValues1=1×2 cell array
{'minutes'} {[3]}
sys1에서 상속한 속성으로 frd 모델을 만듭니다.
rng(0) response = randn(1,1,7)+1i*randn(1,1,7); w = logspace(-2,2,7); sys2 = frd(response,w,sys1)
sys2 =
Frequency(rad/minute) Response
--------------------- --------
0.0100 0.5377 + 0.3426i
0.0464 1.8339 + 3.5784i
0.2154 -2.2588 + 2.7694i
1.0000 0.8622 - 1.3499i
4.6416 0.3188 + 3.0349i
21.5443 -1.3077 + 0.7254i
100.0000 -0.4336 - 0.0631i
Input delays (minutes): 3
Continuous-time frequency response.
Model Properties
propValues2 = {sys2.TimeUnit,sys2.InputDelay}propValues2=1×2 cell array
{'minutes'} {[3]}
frd 모델 sys2가 sys1과 동일한 속성을 가짐을 알 수 있습니다.
이 예제에서는 물탱크 모델과 관련해 수집된 주파수 응답 데이터를 불러옵니다.
load wtankData.mat이 모델에는 1개의 입력인 Voltage와 1개의 출력인 Water height가 있습니다.
입력 이름과 출력 이름을 지정하여 frd 모델을 만듭니다.
sys = frd(response,frequency,'InputName','Voltage','OutputName','Height');
주파수 응답을 플로팅합니다.
bode(sys)
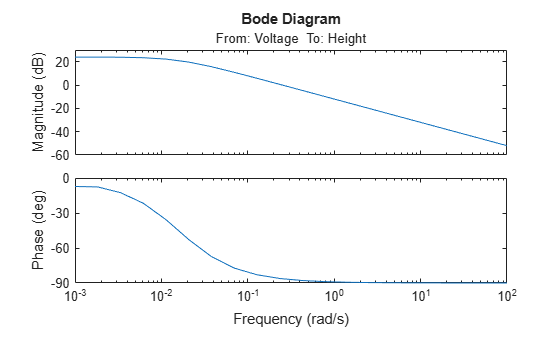
입력 이름과 출력 이름이 보드 플롯에 표시됩니다. 입력 이름과 출력 이름을 지정하면 MIMO 시스템의 응답 플롯을 처리할 때 유용할 수 있습니다.
이 예제에서는 다음 상태공간 모델의 frd 모델을 계산합니다.
상태공간 행렬을 사용하여 상태공간 모델을 만듭니다.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
상태공간 모델 ltiSys를 0.01rad/s와 100rad/s 사이의 주파수에 대한 frd 모델로 변환합니다.
w = logspace(-2,2,50); sys = frd(ltiSys,w);
주파수 응답을 비교합니다.
bode(ltiSys,'b',sys,'r--')
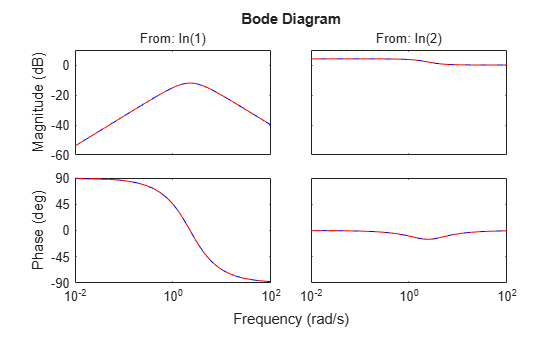
응답이 동일합니다.
frd 모델들로 구성된 배열을 만들려면 주파수 응답 데이터로 구성된 다차원 배열을 지정하면 됩니다.
예를 들어 응답 데이터를 크기가 [NY NU NF S1 ... Sn]인 숫자형 배열로 지정하면 함수는 frd 모델로 구성된 S1×...×Sn 배열을 반환합니다. 이러한 각 모델에는 NY개의 출력, NU개의 입력, NF개의 주파수 지점이 있습니다.
0.1rad/s와 10rad/s 사이의 10개 주파수 지점에서 1-출력, 2-입력 모델을 사용하여 무작위 응답 데이터로 구성된 2×3 배열을 생성합니다.
w = logspace(-1,1,10); r = randn(1,2,10,2,3)+1i*randn(1,2,10,2,3); sys = frd(r,w);
모델 배열에서 인덱스 (2,1)에 있는 모델을 추출합니다.
sys21 = sys(:,:,2,1)
sys21 =
From input 1 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 0.6715 + 0.0229i
0.1668 0.7172 - 1.7502i
0.2783 0.4889 - 0.8314i
0.4642 0.7269 - 1.1564i
0.7743 0.2939 - 2.0026i
1.2915 0.8884 + 0.5201i
2.1544 -1.0689 - 0.0348i
3.5938 -2.9443 + 1.0187i
5.9948 0.3252 - 0.7145i
10.0000 1.3703 - 0.2248i
From input 2 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 -1.2075 - 0.2620i
0.1668 1.6302 - 0.2857i
0.2783 1.0347 - 0.9792i
0.4642 -0.3034 - 0.5336i
0.7743 -0.7873 + 0.9642i
1.2915 -1.1471 - 0.0200i
2.1544 -0.8095 - 0.7982i
3.5938 1.4384 - 0.1332i
5.9948 -0.7549 + 1.3514i
10.0000 -1.7115 - 0.5890i
Continuous-time frequency response.
Model Properties
frd 객체에 음수 주파수 값을 지정할 수 있습니다. 이 기능은 복소 계수를 갖는 모델의 주파수 응답 데이터를 캡처하고자 할 때 유용합니다.
양수 값과 음수 값이 모두 있는 주파수 벡터를 만듭니다.
w0 = sort([-logspace(-2,2,50) 0 logspace(-2,2,50)]);
복소 계수를 갖는 상태공간 모델을 만듭니다.
A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D);
지정된 주파수에서 모델을 frd 모델로 변환합니다.
sys = frd(Gc,w0);
모델의 주파수 응답을 플로팅합니다.
bode(Gc,'b',sys,'r--')
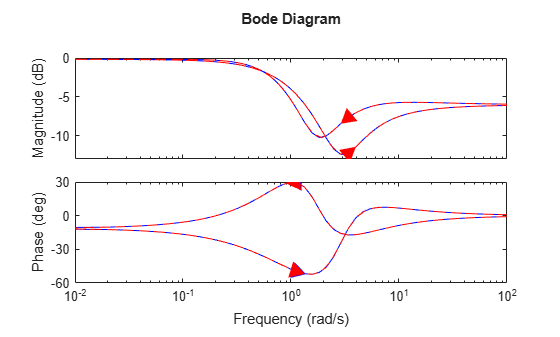
플롯 응답이 거의 일치합니다. 플롯에는 복소 계수를 갖는 모델에 대해 두 개의 분기가 표시되는데, 하나는 오른쪽을 가리키는 화살표가 있는 양수 주파수에 대한 것이고 다른 하나는 왼쪽을 가리키는 화살표가 있는 음수 주파수에 대한 것입니다. 두 분기에서 화살표는 주파수가 증가하는 방향을 나타냅니다.
버전 내역
R2006a 이전에 개발됨