이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
parallel
두 모델의 병렬 연결
구문
설명
sys = parallel(sys1,sys2,in1,in2,out1,out2)
벡터 in1과 1n2에는 sys1과 sys2의 입력에 대한 인덱스가 포함되어 있으며, 이 두 입력은 입력 u를 받습니다. 마찬가지로 out1과 out2는 sys1과 sys2의 출력을 지정하는 벡터이며, 이 벡터를 합산하면 출력 y가 생성됩니다. 결과로 얻은 sys는 입력 [v1,u,v2]를 가지며, 여기서 v1과 v2는 in1과 1n2에 지정되지 않은 입력입니다. 마찬가지로 sys는 [z1,y,z2] 출력을 가지며, 여기서 z1과 z2는 out1과 out2에 지정되지 않은 출력입니다.
예제
두 개의 SISO 시스템을 만듭니다. 하나는 상태공간 모델이고 다른 하나는 전달 함수입니다.
sys1 = rss(3); sys2 = tf(1,[1 1 1]);
두 시스템을 병렬로 상호 연결하고 그 결과 모델을 검토합니다.
sys = parallel(sys1,sys2); size(sys)
State-space model with 1 outputs, 1 inputs, and 5 states.
전달 함수를 상태공간 모델에 연결하면 또 다른 상태공간 모델이 생성됩니다. 서로 다른 유형의 모델을 결합한 결과에 대한 자세한 내용은 Rules That Determine Model Type 항목을 참조하십시오.
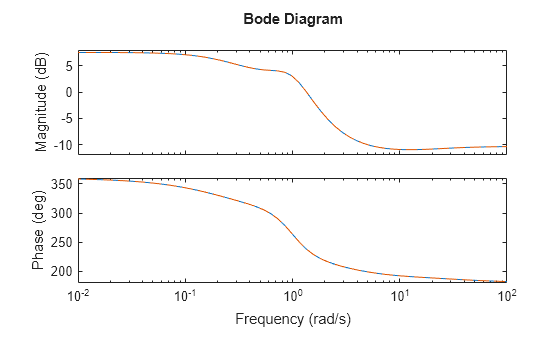
병렬 상호 연결은 두 모델을 산술적으로 합산하는 것과 동일합니다. 주파수 응답을 조사하여 이 동등성을 확인합니다.
sysa = sys1 + sys2; bodeplot(sys,'-',sysa,'--')
두 개의 MIMO 시스템을 병렬로 연결합니다. 두 시스템의 입력-출력 차원이 같으면 모든 입력과 출력을 연결할 수 있습니다. 예를 들어, 3개 출력과 2개 입력을 갖는 시스템을 두 개 만들고 상호 연결을 형성합니다.
sys1 = rss(4,3,2); sys2 = rss(4,3,2); sys = parallel(sys1,sys2);
그 결과 모델은 동일한 입력-출력 차원을 갖게 됩니다.
size(sys)
State-space model with 3 outputs, 2 inputs, and 8 states.
연결하려는 신호에 일치하는 이름을 지정하여 병렬 연결을 형성할 수 있습니다. 3개 출력과 4개 입력을 갖는 시스템 sys1 및 2개 출력과 3개 입력을 갖는 시스템 sys2를 만들고 다이어그램에 보이는 것처럼 병렬 연결을 형성합니다.
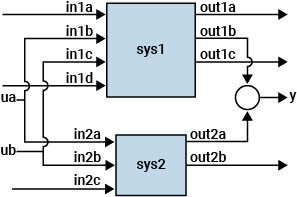
두 시스템의 상태공간 모델을 만들고 입력 및 출력 신호의 이름을 지정합니다.
% sys1: 3-output, 4-input sys1 = rss(4,3,4); sys1.InputName = ["in1a","in1b","in1c","in1d"]; sys1.OutputName = ["out1a","out1b","out1c"]; % sys2: 2-output, 3-input sys2 = rss(3,2,3); sys2.InputName = ["in2a","in2b","in2c"]; sys2.OutputName = ["out2a","out2b"];
다이어그램에 표시된 상호 연결을 보면 sys1의 입력 2와 입력 3은 각각 sys2의 입력 1과 입력 2에 연결되어 있습니다. 또한 이 다이어그램에서 sys1의 두 번째 출력이 sys2의 첫 번째 출력과 합산되는 것을 볼 수 있습니다. 연결 신호의 이름이 일치하도록 신호 이름을 변경합니다.
sys1.InputName = ["in1a","u1","u2","in1d"]; sys1.OutputName = ["out1a","y1","out1c"]; sys2.InputName = ["u1","u2","in2c"]; sys2.OutputName = ["y1","out2b"];
name 플래그를 사용하여 연결을 형성합니다.
sys = parallel(sys1,sys2,"name");sys의 차원, 입력, 출력을 검토하여 모든 연결이 다이어그램의 연결과 일치하는지 확인합니다.
size(sys)
State-space model with 4 outputs, 5 inputs, and 7 states.
sys.InputName
ans = 5×1 cell
{'in1a'}
{'in1d'}
{'u1' }
{'u2' }
{'in2c'}
sys.OutputName
ans = 4×1 cell
{'out1a'}
{'out1c'}
{'y1' }
{'out2b'}
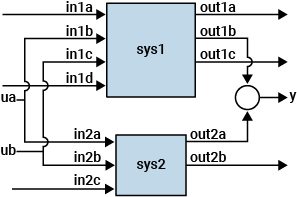
연결하려는 신호의 인덱스를 지정하면 모델 입력 및 출력의 서브셋을 사용하여 병렬 상호 연결을 형성할 수 있습니다. 3개 출력과 4개 입력을 갖는 시스템 sys1 및 2개 출력과 3개 입력을 갖는 시스템 sys2를 만들고 다이어그램에 보이는 것처럼 병렬 연결을 형성합니다.
두 시스템의 상태공간 모델을 만듭니다.
% sys1: 3-output, 4-input sys1 = rss(4,3,4); % sys2: 2-output, 3-input sys2 = rss(3,2,3);
상호 연결을 형성하기 위해, 연결할 각 모델의 입력과 출력을 지정하는 벡터를 만듭니다. 예를 들어, 다이어그램에 보이는 것처럼 sys1의 입력 2와 입력 3은 각각 sys2의 입력 1과 입력 2에 연결됩니다. 따라서 입력 인덱스를 다음과 같이 지정합니다.
inp1 = [2 3]; % indices of in1b and in1c inp2 = [1 2]; % indices of in2a and in2b
또한 이 다이어그램에서 sys1의 두 번째 출력이 sys2의 첫 번째 출력과 합산되는 것을 볼 수 있습니다.
out1 = [2]; % index of out1b out2 = [1]; % index of out2a
이들 값을 사용하여 병렬 상호 연결을 형성합니다.
sys = parallel(sys1,sys2,inp1,inp2,out1,out2);
예상대로 결과 모델은 출력이 4개, 입력이 5개입니다.
size(sys)
State-space model with 4 outputs, 5 inputs, and 7 states.
입력 인수
출력 인수
버전 내역
R2006a 이전에 개발됨