lqi
선형-2차-적분 제어
구문
[K,S,e] = lqi(SYS,Q,R,N)
설명
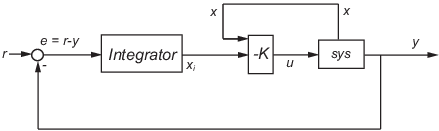
lqi는 다음 Figure에 표시된 추종 루프에 대한 최적의 상태-피드백 제어 법칙을 계산합니다.
다음 상태공간 방정식(또는 그에 대응하는 이산 방정식)을 갖는 플랜트 sys의 경우:
상태-피드백 제어의 형식은 다음과 같습니다.
여기서 xi는 적분기 출력입니다. 이 제어 법칙은 출력 y가 기준 명령 r을 추종하도록 합니다. MIMO 시스템의 경우, 적분기 개수는 출력 y의 차원과 같습니다.
[K,S,e] = lqi(SYS,Q,R,N)은 플랜트의 상태공간 모델 SYS 및 가중 행렬 Q, R, N이 주어진 경우, 최적 이득 행렬 K를 계산합니다. 제어 법칙 u = –Kz = –K[x;xi]는 다음 비용 함수를 최소화합니다(r = 0인 경우).
(연속시간의 경우)
(이산시간의 경우)
이산시간인 경우, lqi는 순방향 오일러 공식을 사용하여 적분기 출력 xi를 계산합니다.
여기서 Ts는 SYS의 샘플 시간입니다.
행렬 N을 생략할 경우 N은 0으로 설정됩니다. lqi는 관련된 대수 리카티 방정식의 해 S와 폐루프 고유값 e도 반환합니다.
제한 사항
증강된 적분기가 있는 플랜트를 가진 다음과 같은 상태공간 시스템의 경우:
문제 데이터는 다음을 충족해야 합니다.
쌍(A,B)은 안정화 가능해야 합니다.
R은 양의 정부호여야 합니다.
은 양의 준정부호여야 합니다(과 동등함).
는 허수축에서(또는 이산시간에서는 단위원에서) 관측 불가능한 모드를 갖지 않아야 합니다.
팁
lqi는 정칙 E를 갖는 디스크립터 모델을 지원합니다. lqi의 출력 S는 상응하는 명시적 상태공간 모델에 대한 리카티 방정식의 해입니다.
참고 문헌
[1] P. C. Young and J. C. Willems, "An approach to the linear multivariable servomechanism problem", International Journal of Control, Volume 15, Issue 5, May 1972 , pages 961–979.
버전 내역
R2008b에 개발됨