ROS 네트워크 연결 및 탐색
ROS에 연결하여 로보틱스 애플리케이션 프로토타입을 만들고, ROS 네트워크를 통해 로보틱스 하드웨어 또는 로보틱스 시뮬레이터에 액세스합니다. MATLAB®을 사용하여 자체 ROS 네트워크를 만들거나 기존 ROS 네트워크에 연결할 수 있습니다. ROS 네트워크를 설정하려면 먼저 rosinit 함수를 호출합니다.
좌표계 간의 변환에 ROS 토픽으로 액세스하고 이를 사용하여 MATLAB에서 데이터를 변환할 수 있습니다. 자세한 내용은 Access the tf Transformation Tree in ROS 항목을 참조하십시오.
rosrate 객체를 사용하여 코드 실행 타이밍을 제어할 수 있습니다.
참고
2025년 5월 31일 기준, ROS 1은 수명 종료되었으며 더 이상 공식적으로 지원되지 않습니다. 최신 기능과 업데이트에 액세스하려면 ROS 2로 마이그레이션하는 것이 좋습니다. 네트워크 연결 및 탐색을 지원하는 상응하는 ROS Toolbox 기능에 대한 자세한 내용은 ROS 2 네트워크 연결 및 탐색 항목을 참조하십시오.
함수
객체
블록
| Blank Message | 지정된 메시지 유형을 사용해 빈 메시지 생성 |
| Current Time | 현재 ROS 시간 또는 시스템 시간 가져오기 |
| Set Parameter | Set values on ROS parameter server |
| Coordinate Transformation Conversion | 지정된 좌표 변환 표현으로 변환 |
도움말 항목
- ROS Network Setup
Summary of ROS network setup and information required for connection.
- Execute Code Based on ROS Time
Using a
rosrateobject allows you to control the rate of your code execution based on the ROS Time/clocktopic.
추천 예제

ROS 시작하기
MATLAB에서 ROS를 설정하여 ROS 네트워크와 ROS 메시지에 대한 정보를 가져옵니다.

ROS 네트워크에 연결하기
MATLAB에서 ROS master를 만들어 외부 ROS master에 연결합니다.

Access the ROS Parameter Server
Add and retrieve parameters on the ROS parameter server.

Access the tf Transformation Tree in ROS
Access available coordinate frames, retrieve transformations between them, and transform points, vectors, and other entities between any two coordinate frames.
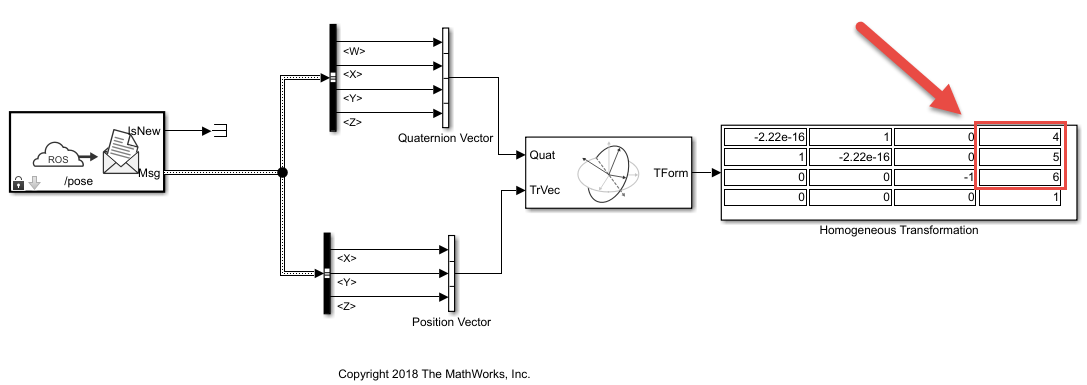
Convert a ROS Pose Message to a Homogeneous Transformation
This model subscribes to a Pose message on the ROS network and
converts it to a homogeneous transformation.
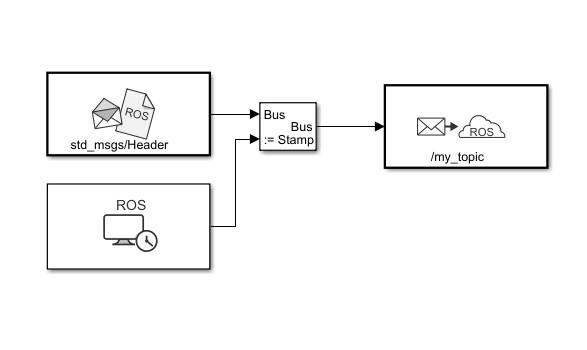
Time Stamp ROS Message Using Current Time in Simulink
Time stamp a ROS message with the current system time of your computer.