Current Time
현재 ROS 시간 또는 시스템 시간 가져오기
라이브러리:
ROS Toolbox /
ROS
설명
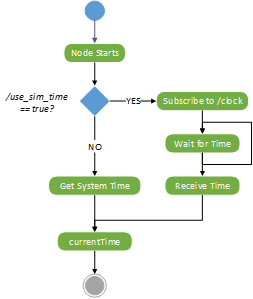
Current Time 블록은 현재 ROS 시간 또는 시스템 시간을 출력합니다. ROS 시간은 컴퓨터의 시스템 시계 또는 ROS 노드에 퍼블리시되는 /clock 토픽을 기반으로 합니다.
이 블록을 사용하여 시뮬레이션 시간을 연결된 ROS 노드와 동기화합니다.
use_sim_time ROS 파라미터가 true로 설정된 경우 블록은 /clock 토픽에 퍼블리시된 시뮬레이션 시간을 반환합니다. 그렇지 않은 경우, 블록은 시스템의 시스템 시간을 반환합니다.
예제
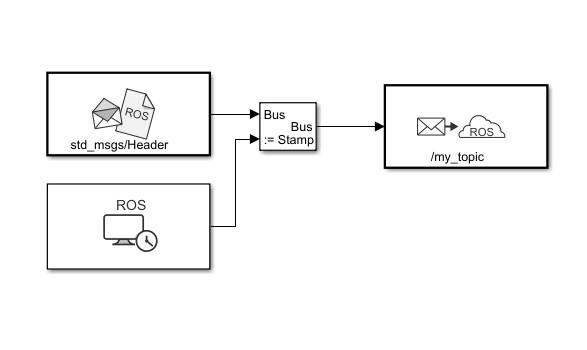
Time Stamp ROS Message Using Current Time in Simulink
Time stamp a ROS message with the current system time of your computer.
포트
출력
파라미터
팁
use_sim_time파라미터를 설정하고/clock토픽에서 시간을 가져오려면 다음을 수행합니다.ROS 네트워크에 연결한 다음 Set Parameter 블록을 사용하거나 MATLAB® 명령 창에서 파라미터를 설정합니다.
ptree = rosparam; set(ptree,'/use_sim_time',true)
일반적으로
/clock토픽에 퍼블리시하는 ROS 노드가 파라미터를 설정합니다.
확장 기능
버전 내역
R2019b에 개발됨