이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
네트워크 액세스
ROS Toolbox는 기존의 ROS 및 ROS 2 네트워크에 연결하는 인터페이스를 제공할 수 있으며, 또한 MATLAB과 Simulink를 사용하는 데스크탑 시뮬레이션과 하드웨어 인터페이스를 위한 ROS 및 ROS 2 네트워크를 만들 수 있습니다. ROS 및 ROS 2 노드를 생성하거나 액세스하고 subscriber와 publisher를 사용하여 이들 노드 간의 통신을 설정할 수 있습니다. 또한 이 네트워크에서 ROS 및 ROS 2 파라미터와 변환을 생성하거나 액세스할 수 있습니다. ROS 및 ROS 2 노드에 대한 자세한 내용은 Connect to ROS Network and Establish Communication 항목과 Connect to ROS 2 Network and Establish Communication 항목을 각각 참조하십시오.
서비스 클라이언트로부터 요청을 받아 작업을 수행하고 응답을 전달하는 ROS 및 ROS 2 서비스 서버를 생성하거나 액세스할 수 있습니다. ROS 및 ROS 2 서비스에 대한 자세한 내용은 Explore ROS Services: Service Client and Service Server Guide 항목과 Explore ROS 2 Services: Service Client and Service Server Guide 항목을 각각 참조하십시오.
액션 클라이언트로부터 목표 실행 요청을 받고 목표 실행을 처리하는 동안 피드백을 전달하는 ROS 및 ROS 2 액션 서버를 생성하고 액세스할 수 있습니다. ROS 및 ROS 2 액션에 대한 자세한 내용은 Explore ROS Actions: Action Client and Action Server Guide 항목과 Explore ROS 2 Actions: Action Client and Action Server Guide 항목을 각각 참조하십시오.
카테고리
- ROS 2 네트워크 액세스
MATLAB 및 Simulink를 통해 ROS 2 네트워크에 연결
- ROS 네트워크 액세스
MATLAB 및 Simulink를 통해 ROS 네트워크에 연결
추천 예제

Call and Provide ROS 2 Services
Set up service servers to advertise a service to the ROS network. In addition, you will learn how to use service clients to call the server and receive a response.

Access the tf Transformation Tree in ROS 2
Access tf Transformation Tree in ROS 2.

Switching Between ROS Middleware Implementations
Switch between different ROS 2 middleware implementations in MATLAB and Simulink.
Manage Quality of Service Policies in ROS 2
Description of Quality of Service (QoS) policy options that allow changing the behavior of communication within a ROS 2 network.

Use ROS Bridge to Establish Communication Between ROS and ROS 2
Control the TurtleBot3 in Gazebo using keyboard commands from MATLAB.

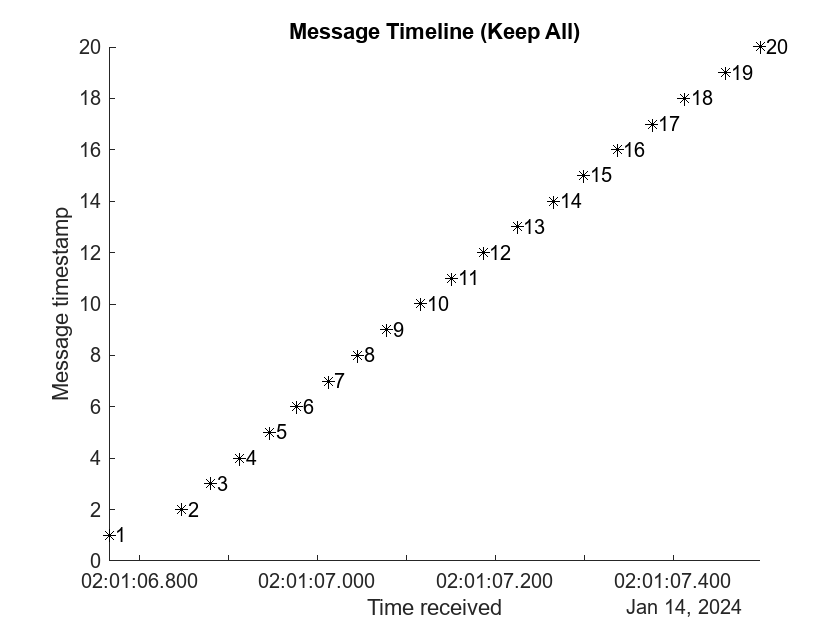
ROS 2 Publisher 및 ROS 2 Subscriber를 사용해 데이터 교환하기
ROS 네트워크에서 토픽을 퍼블리시하고 서브스크라이브합니다.

Work with Basic ROS Messages
Create, explore, and populate ROS messages in MATLAB, that are commonly encountered in robotics applications.

Call and Provide ROS Services
Set up service servers to advertise a service to the ROS network.

Access the ROS Parameter Server
Add and retrieve parameters on the ROS parameter server.

Access the tf Transformation Tree in ROS
Access available coordinate frames, retrieve transformations between them, and transform points, vectors, and other entities between any two coordinate frames.
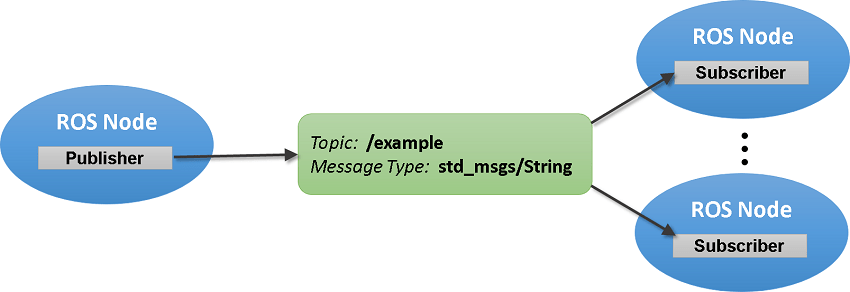
ROS Publisher 및 ROS Subscriber를 사용해 데이터 교환하기
ROS 네트워크에서 토픽을 퍼블리시하고 서브스크라이브합니다.