Blank Message
지정된 메시지 유형을 사용해 빈 메시지 생성
라이브러리:
ROS Toolbox /
ROS
설명
Blank Message 블록은 선택한 ROS 메시지 유형에 상응하는 Simulink® 비가상 버스를 만듭니다. 이 블록은 Publish 블록, Subscribe 블록, Call Service 블록과 작동하는 ROS 메시지 버스를 만듭니다. 각 샘플 적중 시 블록은 지정된 메시지 유형에 대해 빈 메시지 또는 “0” 신호를 출력합니다. 버스의 모든 요소는 0으로 초기화됩니다. 가변 길이 배열의 길이도 0으로 초기화됩니다.
예제
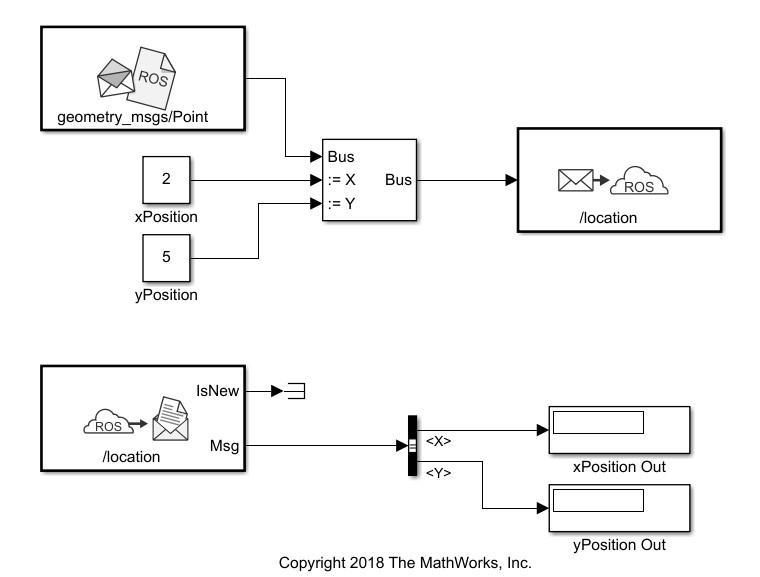
Simulink에서 ROS 메시지 퍼블리시 및 서브스크라이브
Simulink를 사용하여 ROS 토픽을 퍼블리시하고 서브스크라이브합니다.
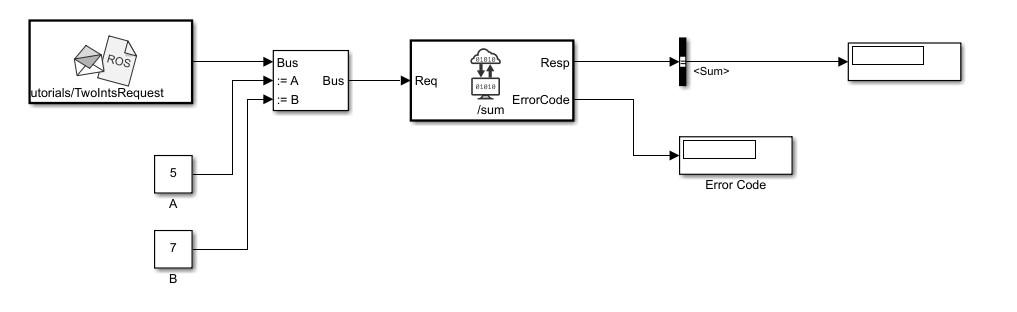
Call ROS Service in Simulink
Use the Call Service block to call a service on the ROS service server.
제한 사항
R2016b 이전 릴리스에서는 특정 예약된 속성 이름과 함께 ROS 메시지 유형을 사용하는 모델은 코드를 생성할 수 없었습니다. 2016b 릴리스에서는 이러한 제한 사항이 제거되었습니다. 이제 속성 이름에 밑줄이 추가되었습니다(예: Vector3Stamped_). R2016b 이전 릴리스로 생성된 모델을 사용하는 경우 밑줄이 추가된 새 이름을 사용하여 ROS 메시지 유형을 업데이트하십시오. 가변 길이 배열의 사용자 지정 최대 크기를 다시 정의하십시오.
영향을 받는 메시지 유형은 다음과 같습니다.
'geometry_msgs/Vector3Stamped''jsk_pcl_ros/TransformScreenpointResponse''pddl_msgs/PDDLAction''rocon_interaction_msgs/Interaction''capabilities/GetRemappingsResponse''dynamic_reconfigure/Group'
포트
출력
파라미터
확장 기능
버전 내역
R2019b에 개발됨