System Composer Concepts
System Composer™ combines concepts from systems engineering with concepts from Simulink®. This page defines these concepts and their respective applications to help you understand how these domains overlap. Use this page to learn about relevant concepts and how they apply to systems engineering design. Each section defines a concept, explains how the concept is used in System Composer, then links to more information in the documentation.
Author Models to Describe Structure of System and Software Architectures
Extend Architecture Modeling Language with Profiles and Stereotypes
Use Analysis to Perform Trade Studies and Validate Architectures Against Constraints
Define Relationships Between Elements of Different Architecture Models Using Allocations
Scope Complex Architectures into Simpler Diagrams by Creating Filtered Views
Simulate Integrated Architecture by Implementing Component Behaviors
Manage and Verify Requirements to Prove System Compliance with Stakeholder Needs
Specify Operational Constraints Between Components Using Executable Sequence Diagrams
Author and Simulate Activity Diagrams to Allocate to Components
Based on your architectural modeling goal, review the corresponding section to learn more about key concepts associated with that goal.
Author Models to Describe Structure of System and Software Architectures
Author architecture models in System Composer to model and describe your system of systems.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Architecture | A System Composer architecture represents a system of components and how they interface with each other structurally and behaviorally. | Different types of architectures describe different aspects of systems. You can use views to visualize a subset of components in an architecture. You can define parameters on the architecture level using the Parameter Editor. | |
| Root | A root is at the top of an architecture hierarchy. A root architecture has a boundary defined by its architecture ports that surround the system of interest. | The root architecture has a system boundary surrounding your architecture model. You can add architecture ports that define interfaces across the boundary. | |
| Model | A System Composer model is the file that contains architectural information, such as components, ports, connectors, interfaces, and behaviors. | Perform operations on a model including extracting root-level architecture, applying profiles, linking interface data dictionaries, or generating instances from model architecture. A System Composer model is stored as an SLX file. | Create Architecture Model with Interfaces and Requirement Links |
| Component | A component is a replaceable part of a system that fulfills a clear function in the context of an architecture. A component defines an architectural element, such as a function, another system, hardware, software, or other conceptual entity. A component can also be a subsystem or subfunction. | Represented as a block, a component is a part of an architecture model that can be separated into reusable artifacts. Transfer information between components using port interfaces and parameters. Port interfaces and parameters can be configured using the Interface Editor and the Parameter Editor. | |
| Port | A port is a node on a component or architecture that represents a point of interaction with its environment. A port permits the flow of information to and from other components or systems. | Component ports are interaction points on the component to other components. Architecture ports are ports on the boundary of the system, whether the boundary is within a component or the overall architecture model. The root architecture has a boundary defined by its ports. | |
| Connector | Connectors are lines that provide connections between ports. Connectors describe how information flows between components or architectures. | A connector allows two components to interact without defining the nature of the interaction. Set an interface on a port to define how the components interact. |
Author Physical Behaviors for Components Using Simscape
Author physical models in System Composer by using subsystem components. A subsystem component is a Simulink subsystem that is part of the parent System Composer architecture model. Physical information can extend past subsystem component boundaries. You can describe physical components with physical ports, connectors, and interfaces. Use Simscape™ blocks to describe the behavior of such physical components.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Physical subsystem | A physical subsystem is a Simulink subsystem with Simscape connections. | A physical subsystem with Simscape connections uses a physical network approach suited for simulating systems with real physical components and represents a mathematical model. | Implement Component Behavior Using Simscape |
| Physical port | A physical port represents a Simscape physical modeling connector port called a Connection Port (Simscape). | Use physical ports to connect components in an architecture model or to enable physical systems in a Simulink subsystem. | Define Physical Ports on Component |
| Physical connector | A physical connector can represent a nondirectional conserving connection of a specific physical domain. Connectors can also represent physical signals. | Use physical connectors to connect physical components that represent features of a system to simulate mathematically. | Architecture Model with Simscape Behavior for a DC Motor |
| Physical interface | A physical interface defines the kind of information that flows through a physical port. The same interface can be assigned to multiple ports. A physical interface is a composite interface equivalent to a | Use a physical interface to bundle physical elements to describe a physical model using at least one physical domain. | Specify Physical Interfaces on Ports |
| Physical element | A physical element describes the decomposition of a physical interface. A physical element is equivalent to a | Define the | Describe Component Behavior Using Simscape |
Describe Port Specifications Using Interfaces
Define interfaces to represent the kind of information that flows through a port. Assign interfaces to ports using the Interface Editor. Use an Adapter block to reconcile differences between interfaces on a connector between ports.
Manage owned interfaces local to a port using the Property Inspector Parameters tab.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Data dictionary | A data dictionary is a repository of data relevant to your model. The Architectural Data section of a data dictionary stores shared definitions used in Simulink and architecture model interfaces, such as port interfaces, data types, and system wide constants. For more information, see What Is a Data Dictionary? | You can save local interfaces on a System Composer model to the Architectural Data section of a Simulink data dictionary using the Interface Editor. In addition to the Interface Editor, you can also use the Architectural Data Editor to manage and modify interfaces and value types. | |
| Data interface | A data interface defines the kind of information that flows through a port. You can assign the same interface to multiple ports. A data interface can be composite, meaning that it can include data elements that describe the properties of an interface signal. | Data interfaces represent the information that is shared through a connector and enters or exits a component through a port. Use the Interface Editor to create and manage data interfaces and data elements and store them in a data dictionary for reuse between models. | |
| Data element | A data element describes a portion of an interface, such as a communication message, a calculated or measured parameter, or other decomposition of that interface. | Data interfaces are decomposed into data elements that can represent pins or wires in a connector or harness, messages transmitted across a bus, and data structures shared between components. | |
| Port element | A port element represents interface elements available on a port typed by a composite or owned interface. | You can use port elements to access an element of a port by selecting the port name on the chevrons connected to root-level ports. When an interface element is typed by a composite interface, the nested port elements have two levels of hierarchy. | |
| Value type | A value type can be used as a port interface to define the atomic piece of data that flows through that port and has a top-level type, dimension, unit, complexity, minimum, maximum, and description. | You can also assign the type of data elements in data interfaces to value types. Add value types to data dictionaries using the Interface Editor so that you can reuse the value types as interfaces or data elements. | Create Value Types as Interfaces |
| Owned interface | An owned interface is an interface that is local to a specific port and not shared in a data dictionary or the model dictionary. | Create an owned interface to represent a value type or data interface that is local to a port. | Define Owned Interfaces Local to Ports |
| Adapter | An adapter connects two components with incompatible port interfaces by mapping between the two interfaces. An adapter can act as a unit delay, rate transition, or merge. You can also use an adapter for bus creation. Use the Adapter block to implement an adapter. | With an adapter, on the Interface Adapter dialog box, you
can: create and edit mappings between input and output interfaces, apply an interface conversion
|
Extend Architecture Modeling Language with Profiles and Stereotypes
Create a profile in the Profile Editor and add stereotypes to it with properties. Apply the stereotype to a component, and set the property value in the Property Inspector.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Stereotype | Stereotypes provide a mechanism to extend the core language elements and add domain-specific metadata. | Apply stereotypes to core element types. An element can have multiple stereotypes. Stereotypes allow you to style different elements. Stereotypes provide elements with a common set of properties, such as mass, cost, and power. | |
| Property | A property is a field in a stereotype. You can specify property values for each element to which the stereotype is applied. | Use properties to store quantitative characteristics, such as weight or speed, that are associated with a model element. Properties can also be descriptive or represent a status. You can view and edit the properties of each element in the architecture model using the Property Inspector. For more information, see Use Property Inspector in System Composer. | |
| Profile | A profile is a package of stereotypes. | You can use profiles to create a domain of specialized element types. Author profiles and apply profiles to a model using the Profile Editor. You can store stereotypes for a project in one or several profiles. When you save profiles, they are stored in XML files. |
Represent Design Alternatives Using Variant Components
Create variant components and implement multiple design alternatives or variants, chosen based on programmatic rules. Add variant choices to a component to make a variant component. The active choice represents the original component.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Variant | A variant is one of many structural or behavioral choices in a variant component. | Use variants to quickly swap different architectural designs for a component while performing analysis. | Create Variants |
| Variant control | A variant control is a string that controls the active variant choice. | Set the variant control programmatically to control which variant is active. | Set Variant Control Condition |
Use Analysis to Perform Trade Studies and Validate Architectures Against Constraints
Create an analysis function to analyze power consumption in the
RobotDesign architecture model.
function RobotDesign_1(instance,varargin) if instance.isComponent() && ~isempty(instance.Components) ... && instance.hasValue('RobotProfile.ElectricalComponent.Power') sysComponent_power = 0; for child = instance.Components if child.hasValue('RobotProfile.ElectricalComponent.Power') comp_power = child.getValue('RobotProfile.ElectricalComponent.Power'); sysComponent_power = sysComponent_power + comp_power; instance.setValue('RobotProfile.ElectricalComponent.Power', ... sysComponent_power); end end end
Analyze the robot design by using the analysis function to determine total power usage.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Analysis | Static analysis analyzes the structure of the system to quantitatively evaluate an architecture for certain characteristics. Static analysis uses an analysis function and parametric values of properties and parameters captured in the system model. | Use analyses to calculate overall reliability, mass roll-up, performance, or thermal characteristics of a system, or to perform a size, weight, and power (SWaP) analysis to increase efficiency. | |
| Analysis function | An analysis function is a MATLAB® function that computes values necessary to evaluate the architecture using the properties of each element in the model instance and instance-specific parameters at the component and architecture levels. | Use an analysis function to calculate the result of an analysis. | |
| Instance model | An instance model is a collection of instances. | You can update an instance model with changes to a model, but the instance model will not update with changes in active variants or model references. You can use an instance model, saved in a | Run Analysis Function |
| Instance | An instance is an occurrence of an architecture model element at a given point in time. | An instance freezes the active variant or model reference of the component in the instance model. | Create a Model Instance for Analysis |
Define Relationships Between Elements of Different Architecture Models Using Allocations
In the Allocation Editor, allocate components between two architecture models, based on a dependency or a directed relationship.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Allocation | An allocation establishes a directed relationship from architectural elements — components, ports, and connectors — in one model to architectural elements in another model. | Resource-based allocation allows you to allocate functional architectural elements to logical architectural elements and logical architectural elements to physical architectural elements. | |
| Allocation scenario | An allocation scenario contains a set of allocations between a source and a target model. | Allocate between model elements in an allocation scenario. The default allocation scenario is called | Systems Engineering Approach for SoC Applications |
| Allocation set | An allocation set consists of one or more allocation scenarios that describe various allocations between a source and a target model. | Create an allocation set with allocation scenarios in the Allocation Editor. Allocation sets are saved as MLDATX files. |
Scope Complex Architectures into Simpler Diagrams by Creating Filtered Views
Apply a view filter to generate an element group of components for the view in the Architecture Views Gallery.
| Term | Definition | Application | More Information |
|---|---|---|---|
| View | A view shows a customizable subset of elements in a model. Views can be filtered based on stereotypes or names of components, ports, and interfaces, along with the name, type, or units of an interface element. Create views by adding elements manually. Views create a simplified way to work with complex architectures by focusing on certain parts of the architectural design. | You can use different types of views to represent the system. Switch between a component diagram, component hierarchy, or architecture hierarchy. For software architectures, you can switch to a class diagram view. A viewpoint represents a stakeholder perspective that specifies the contents of the view. | |
| Element group | An element group is a grouping of components in a view. | Use element groups to programmatically populate a view. | |
| Query | A query is a specification that describes certain constraints or criteria to be satisfied by model elements. | Use queries to search elements with constraint criteria and to filter views. | Find Elements in Model Using Queries |
| Component diagram | A component diagram represents a view with components, ports, and connectors based on how the model is structured. | Component diagrams allow you to programmatically or manually add and remove components from the view. | Inspect Components in Custom Architecture Views |
| Hierarchy diagram | You can visualize a hierarchy diagram as a view with components, ports, reference types, component stereotypes, and stereotype properties. | Component hierarchy diagrams display components in tree form with parents above children. In a component hierarchy view, each referenced model is represented as many times as it is used. Architecture hierarchy diagrams display unique component architecture types and their relationships using composition connections. In an architecture hierarchy view, each referenced model is represented only once. | Display Component Hierarchy and Architecture Hierarchy Using Views |
Simulate Integrated Architecture by Implementing Component Behaviors
Use a reference component to decompose and reuse architectural components and Simulink model behaviors. Use a subsystem component or state chart to implement Simulink and Stateflow® behaviors.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Reference component | A reference component is a component whose definition is a separate architecture model, Simulink behavior model, or Simulink subsystem behavior. A reference component represents a logical hierarchy of other compositions. | You can synchronize and reuse reference components as Reference Component blocks. Model references are Simulink models. FMU components are components that link to Functional Mockup Unit (FMU) files. Subsystem references are Simulink subsystems. Architecture references are System Composer architecture models or subsystems. | |
| Parameter | A parameter is an instance-specific value of a value type. | Parameters are available for architectures and components that are part of the architecture model. Parameters are also available for components linked to model, subsystem, or architecture references that specify model arguments. You can specify independent values for a parameter on each component. | |
| Subsystem component | A subsystem component is a Simulink subsystem that is part of the parent System Composer architecture model. | Add Simulink subsystem behavior to a component to author a subsystem component in System Composer. You cannot synchronize and reuse subsystem components as Reference Component blocks because the component is part of the parent model. | |
| State chart | A state chart diagram demonstrates the state-dependent behavior of a component throughout its state lifecycle and the events that can trigger a transition between states. | Add Stateflow chart behavior to describe a component using state machines. You cannot synchronize and reuse Stateflow chart behaviors as Reference Component blocks because the component is part of the parent model. |
Manage and Verify Requirements to Prove System Compliance with Stakeholder Needs
In the Requirements Perspective, you can create, manage, and allocate requirements. View the requirements for an architecture model. This functionality requires a Requirements Toolbox™ license.
Use Simulink Test™ to create a test harness for a System Composer component to validate simulation results and verify design in the Simulink Test Manager (Simulink Test). This functionality requires a Simulink Test license.

| Term | Definition | Application | More Information |
|---|---|---|---|
| Requirements | Requirements are a collection of statements describing the desired behavior and characteristics of a system. Requirements help ensure system design integrity and should be achievable, verifiable, unambiguous, and consistent with each other. Each level of design should have appropriate requirements. | To enhance traceability of requirements, link system, functional, customer, performance, or design requirements to components and ports. Link requirements to each other to represent derived or allocated requirements. Manage requirements from the Requirements Manager (Requirements Toolbox) on an architecture model or through custom views. Assign test cases to requirements using the Simulink Test Manager (Simulink Test) for verification and validation. | |
| Requirement set | A requirement set is a collection of requirements. You can structure the requirements hierarchically and link them to components or ports. | Use the Requirements Editor (Requirements Toolbox) to edit and refine requirements in a requirement set. Requirement sets are stored in SLREQX files. You can create a new requirement set and author requirements using Requirements Toolbox, or import requirements from supported third-party tools. | |
| Requirement link | A link is an object that relates two model-based design elements. A requirement link is a link where the destination is a requirement. You can link requirements to components or ports. | View links in System Composer by using the Requirements Manager (Requirements Toolbox). Select a requirement in the Requirements Browser to highlight the component or the port to which the requirement is assigned. Links are stored externally as SLMX files. | |
| Test harness | A test harness is a model that isolates the component under test with inputs, outputs, and verification blocks configured for testing scenarios. You can create a test harness for a model component or for a full model. A test harness gives you a separate testing environment for a model or a model component. | Create a test harness for a System Composer component to validate simulation results and verify design. To edit the interfaces while you are testing the behavior of a component in a test harness, use the Interface Editor. |
|
Specify Operational Constraints Between Components Using Executable Sequence Diagrams
Create a sequence diagram in the Architecture Views Gallery to describe system interactions.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Interaction | An interaction specifies how each part of a system should interact as a sequence of message exchanges. | Use interactions to describe operational system behaviors. | Describe System Behavior Using Sequence Diagrams |
| Sequence diagram | A sequence diagram is a visual representation of an interaction. | Use sequence diagrams to visually specify how each part of a system should interact. | Describe System Behavior Using Sequence Diagrams |
| Lifeline | A lifeline represents an instance of a component as a participant of an interaction. | A lifeline corresponds to a component in an architecture. | Describe Interactions with Lifelines and Messages |
| Message | A message represents communication between two lifelines. Messages have labels to specify the expected condition for the message to occur. | A message label has a trigger, an optional guard, and an optional constraint where a trigger represents the identifying event for this message, a guard represents an additional condition to determine whether the message occurs, and a constraint is an expression that is expected to be true when this message occurs. | Describe Interactions with Lifelines and Messages |
| Gate | A gate represents the root of an architectural hierarchy. | A gate allows you to describe the exchange of messages between the architecture and its environment. | Describe Interactions with Lifelines and Messages |
| Annotation | An annotation describes the elements of a sequence diagram. | Use annotations to provide detailed explanations of elements or workflows captured by sequence diagrams. | Annotate Sequence Diagrams with Annotations |
| Fragment | A fragment encloses a group of lifelines and messages within an interaction to allow for the specification of more complex patterns of interaction. | A fragment defines the type of ordering logic such as looping and alternatives. Fragments can have one or more operands. | Model Complex Interactions with Fragments and Operands |
| Operand | An operand is a region in a fragment, or group of messages. The condition of an operand specifies whether the messages inside the operand execute. | The condition of an operand can specify constraints on the input signal of a lifeline as a MATLAB Boolean expression. | Model Complex Interactions with Fragments and Operands |
| Duration constraint | A duration constraint defines a constraint on elapsed time between a start and an end occurrence. | Use duration constraints to explicitly express a constraint on the duration between a start occurrence and an end occurrence. | Specify Timing Constraints Between Message Events with Duration Constraints |
Author and Simulate Activity Diagrams to Allocate to Components
You can author activity diagrams in System Composer to describe high-level functionality of the system. Use activity diagrams to describe the behavior of systems as a transformation of inputs to outputs through actions that process token flows. You can also simulate and visualize activity diagrams to validate system behavior.
You can allocate elements of an activity diagram to elements of a System Composer architecture model using the Allocation Editor to more fully describe your functional architectural design. For more information, see Design Architectures and Activity Diagram for Mobile Robot.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Activity | An activity describes system behavior that models the flow of tokens from inputs to outputs through a controlled sequence of actions. An activity diagram contains action nodes with pins connected by flow lines. | Use activity to conceptualize a system, visualize functional flow through actions or decisions, and understand how system components interact with one another. | |
| Token | Tokens are objects that flow in the activity diagram. A token can represent data such as structures and integers, or a token can simply pass on the control. | An object token represents an object, such as a piece of data. A control token represents a control or a triggering event that does not carry any data. | |
| Action node | An action node is a key building block in an activity diagram. An action node represents an action to be executed. Action nodes consume input tokens and produce output tokens on pins. | Use a MATLAB function or a nested activity diagram to describe the behavior of an action node. | |
| Control node | A control node routes a logical flow of tokens through the system. | Use control nodes and flows to route tokens. Control nodes can be used to initialize, split, merge, and terminate token flows. | Use Control Nodes to Manipulate Token Flows |
| Pin | A pin acts as a buffer for object tokens and directs tokens into or out of an action node. The directionality of the pin represents input or output. You can connect pins by object flows. | Use pins to route an object token to or from an Action Node. Pins are also used to store object tokens before or during execution. You can use pins only for object flows. | |
| Type | A type defines the contents of a token that flows through a pin. A type has dimension, unit, complexity, minimum, maximum and description. | A value type token is a type assigned to a single value. A composite type token is equivalent to a bus structure that contains field of different values and data types. A MATLAB class type token references a MATLAB class on the path that defines a complex object with properties and methods. You can use a built-in MATLAB class or define your own MATLAB class. | |
| Parameter node | A parameter node routes tokens into or out of a nested activity diagram. When a pin is created, a corresponding parameter node will be created inside the nested activity. | Use a parameter node to define how tokens enter or leave a nested activity. There are two types of parameter nodes input and output. | |
| Flow | A flow in an activity diagram connects two nodes. A dashed line represents a control flow. A solid line represents an object flow. | Tokens in an object flow contains token data on which actions operate. You can use object flows to route input or output tokens to carry information or physical items between object nodes. Tokens in a control flow trigger the execution of actions. You can use control flows to model transfer of control from one Action Node to another. | Simulate, Visualize, and Validate Activity Diagrams |
Author, Simulate, and Deploy Software Architectures
Design a software architecture model, define the execution order of the functions from the components, simulate the design in the architecture level, and generate code.
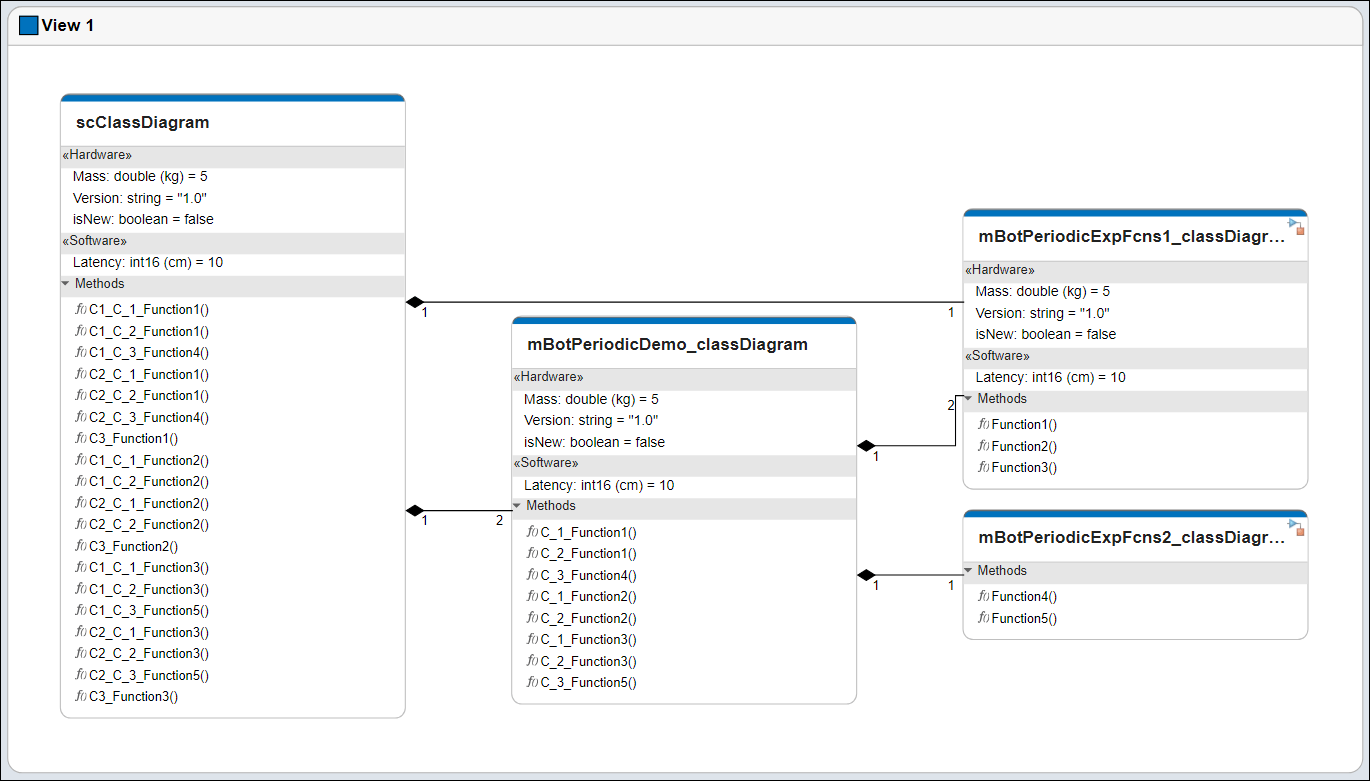
View the software architecture diagram as a class diagram in the Architecture Views Gallery.
| Term | Definition | Application | More Information |
|---|---|---|---|
| Software architecture | A software architecture is a specialization of an architecture for software-based systems, including the description of software compositions, component functions, and their scheduling. | Use software architectures in System Composer to author software architecture models composed of software components, ports, and interfaces. Design your software architecture model, define the execution order of your component functions, simulate your design in the architecture level, and generate code. | |
| Software component | A software component is a specialization of a component for software entities, including its interfaces. | Implement a Simulink export-function, rate-based, or JMAAB model as a software component, simulate the software architecture model, and generate code. | |
| Software composition | A software composition is a diagram of software components and connectors that represents a composite software entity, such as a module or application. | Encapsulate functionality by aggregating or nesting multiple software components or compositions. | Model Software Architecture of Throttle Position Control System |
| Function | A function is an entry point where a transfer of program control occurs and can be defined in a software component. | You can apply stereotypes to functions in software architectures, edit sample times, and specify the function period using the Functions Editor. | Author and Extend Functions for Software Architectures |
| Function element | A function element describes the attributes of a function in a client-server interface. | Edit the function prototype on a function element to change the number and names of inputs and outputs of the function. Edit function element properties as you would edit other interface element properties. Function argument types can include built-in types as well as bus objects. You can specify function elements to support two types of execution. Asynchronous execution is when the client sends a request to the server, the function executes asynchronously based on the priority order, and the function returns the output arguments to the client. Synchronous execution is when the client sends a request to the server, the function runs immediately, and the function returns the output arguments to the client. | systemcomposer.interface.FunctionElement |
| Function argument | A function argument describes the attributes of an input or output argument in a function element. | You can set the properties of a function argument in the Interface Editor just as you would other value types: | systemcomposer.interface.FunctionArgument |
| Service interface | A service interface defines the functional interface between client and server components. Each service interface consists of one or more function elements. | Once you have defined a service interface in the Interface Editor, you can assign it to client and server ports using the Property Inspector. You can also use the Property Inspector to assign stereotypes to service interfaces. | |
| Server | A server is a component that defines and provides a function. | A server component is where the function is defined. You can implement function behavior in a Simulink export-function model. | Service Interfaces Overview |
| Client | A client is a component that sends a request to the server. | A client component is where the function is called. The implementation of function call behavior is dependent on the synchronicity of the function execution. | Service Interfaces Overview |
| Class diagram | A class diagram is a graphical representation of a static structural model that displays unique architecture types of the software components optionally with software methods and properties. | Class diagrams capture one instance of each referenced model and show relationships between them. A component diagram view can be optionally represented as a class diagram for a software architecture model. | Class Diagram View of Software Architectures |
See Also
Topics
- Compose and Analyze Systems Using Architecture Models
- Best Practices for Large-Scale Architecture Modeling
- Organize System Composer Files in Projects
- Simulate Mobile Robot with System Composer Workflow
- Modeling System Architecture of Small UAV