이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
digitalFilter
디지털 필터
Coefficients 속성이 Numerator 및 Denominator 속성으로 대체되었습니다. 자세한 내용은 버전 내역 항목을 참조하십시오.
설명
designfilt를 사용하여 digitalFilter 객체를 설계하고 편집합니다.
designfilt를d = designfilt(resp,Name,Value)형식으로 사용하여 응답 유형resp를 갖는 디지털 필터d를 설계합니다. 이름-값 인수를 사용하여 필터를 사용자 지정합니다.designfilt를designfilt(d)형식으로 사용하여 기존의 필터d를 편집합니다.참고
이는 기존
digitalFilter객체를 편집할 수 있는 유일한 방법입니다. 이 외의 경우, 해당 속성은 읽기 전용입니다.filter를dataOut = filter(d,dataIn)형식으로 사용하여digitalFilterd로 신호를 필터링합니다. 입력값은 배정밀도 벡터이거나 단정밀도 벡터일 수 있습니다. 또한 입력 채널 수만큼의 열을 갖는 행렬일 수도 있습니다.filtfilt및fftfilt함수를digitalFilter객체와 함께 사용할 수도 있습니다.필터 분석기를 사용하여
digitalFilter를 시각화합니다.
속성
객체 함수
예제
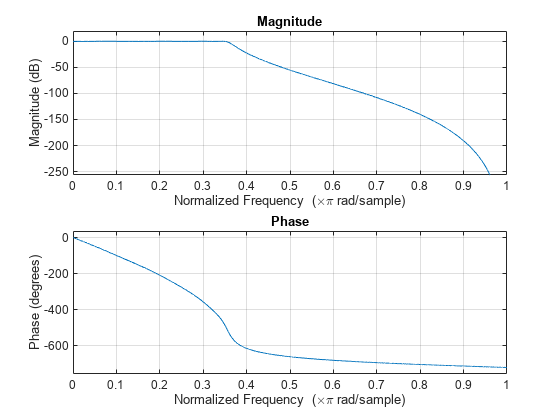
차수 8, 통과대역 주파수 35kHz, 통과대역 리플 0.2dB을 갖는 저역통과 IIR 필터를 설계합니다. 샘플 레이트를 200kHz로 지정합니다. 필터의 주파수 응답을 시각화합니다.
lpFilt = designfilt("lowpassiir",FilterOrder=8, ... PassbandFrequency=35e3,PassbandRipple=0.2, ... SampleRate=200e3); freqz(lpFilt)
설계한 필터를 사용하여 1000개 샘플로 구성된 랜덤 신호를 필터링합니다.
dataIn = randn(1000,1); dataOut = filter(lpFilt,dataIn);
종속 연결 전달 함수로 표현되는 필터 계수를 출력합니다.
ctfNum = lpFilt.Numerator
ctfNum = 4×3
0.2666 0.5333 0.2666
0.1943 0.3886 0.1943
0.1012 0.2023 0.1012
0.0318 0.0636 0.0318
ctfDen = lpFilt.Denominator
ctfDen = 4×3
1.0000 -0.8346 0.9073
1.0000 -0.9586 0.7403
1.0000 -1.1912 0.5983
1.0000 -1.3810 0.5090
세부 정보
참고 문헌
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
버전 내역
R2014a에 개발됨참고 항목
라이브 편집기 작업
앱
객체
함수
bandpass|bandstop|highpass|lowpass|designfilt|double|ctffilt|fftfilt|filt2block|filter|filtfilt|filtord|firtype|freqz|grpdelay|impz|impzlength|info|isallpass|isdouble|isfir|islinphase|ismaxphase|isminphase|issingle|isstable|phasedelay|phasez|single|ss|stepz|tf|zerophase|zpk|zplane