grpdelay
평균 필터 지연(군지연)
구문
설명
grpdelay(___)에 출력 인수를 지정하지 않으면 필터의 군지연 응답을 플로팅합니다.
예제
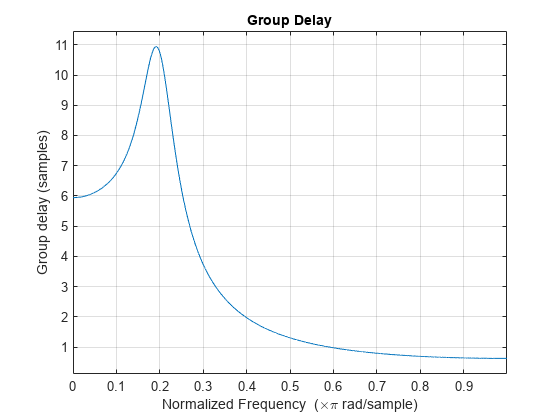
rad/sample의 정규화된 3dB 주파수를 갖고 차수가 6인 버터워스 필터를 설계합니다. grpdelay를 사용하여 군지연을 표시합니다.
[z,p,k] = butter(6,0.2); sos = zp2sos(z,p,k); grpdelay(sos,128)

동일한 Figure에 시스템의 군지연과 위상 지연을 모두 플로팅합니다.
gd = grpdelay(sos,512); [h,w] = freqz(sos,512); pd = -unwrap(angle(h))./w; plot(w/pi,gd,w/pi,pd) grid xlabel("Normalized Frequency (\times\pi rad/sample)") ylabel("Group and phase delays") legend(["Group delay" "Phase delay"])

designfilt를 사용하여, rad/sample의 정규화된 3dB 주파수를 갖는 6차 버터워스 필터를 설계합니다. 군지연 응답을 표시합니다.
d = designfilt("lowpassiir",FilterOrder=6, ... HalfPowerFrequency=0.2,DesignMethod="butter"); grpdelay(d)
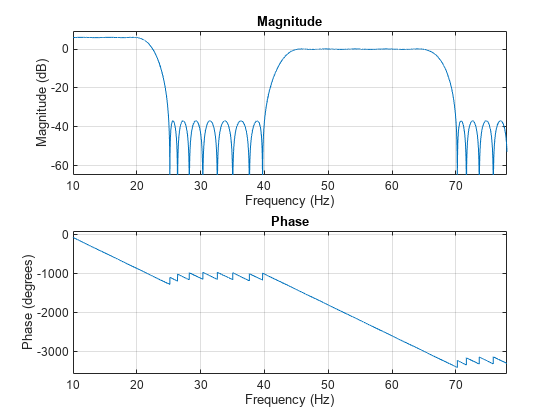
임의 크기 응답을 갖는 88차 FIR 필터를 설계합니다. 필터는 2개의 통과대역과 2개의 저지대역을 갖습니다. 저주파수 통과대역 이득은 고주파수 통과대역 이득의 두 배입니다. 샘플 레이트를 200Hz로 지정합니다. 10Hz부터 78Hz까지 필터의 크기 응답과 위상 응답을 시각화합니다.
fs = 200; d = designfilt('arbmagfir', ... 'FilterOrder',88, ... 'NumBands',4, ... 'BandFrequencies1',[0 20], ... 'BandFrequencies2',[25 40], ... 'BandFrequencies3',[45 65], ... 'BandFrequencies4',[70 100], ... 'BandAmplitudes1',[2 2], ... 'BandAmplitudes2',[0 0], ... 'BandAmplitudes3',[1 1], ... 'BandAmplitudes4',[0 0], ... 'SampleRate',fs); freqz(d,10:1/fs:78,fs)
동일한 주파수 범위에 대해 필터의 군지연 응답을 계산하고 표시합니다. 군지연이 필터 차수의 절반임을 확인합니다.
filtord(d)
ans = 88
grpdelay(d,10:1/fs:78,fs)

R2024b 이후
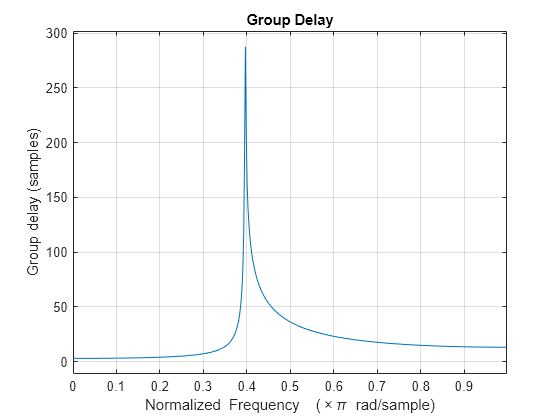
저지대역 경계 주파수가 0.4이고 저지대역 감쇠량이 50dB인 40차 저역통과 체비쇼프 유형 II 디지털 필터를 설계합니다. 필터의 군지연 응답을 CTF 형식의 계수를 사용하여 플로팅합니다.
[B,A] = cheby2(40,50,0.4,"ctf"); grpdelay(B,A,"ctf")
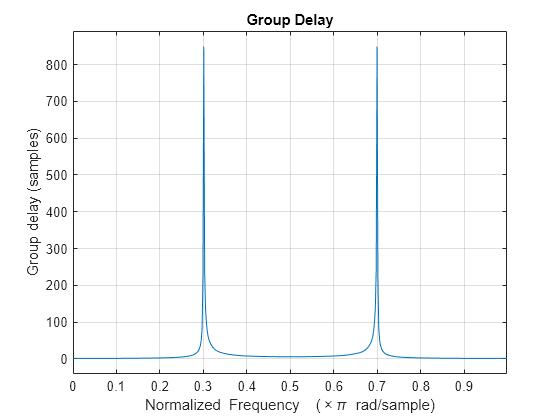
통과대역 경계 주파수가 0.3 및 0.7이고 통과대역 리플이 0.1dB이며 저지대역 감쇠량이 50dB인 30차 대역통과 타원 디지털 필터를 설계합니다. 필터의 군지연 응답을 CTF 형식의 계수 및 이득을 사용하여 플로팅합니다.
[B,A,g] = ellip(30,0.1,50,[0.3 0.7],"ctf"); grpdelay({B,A,g},"ctf")
입력 인수
출력 인수
세부 정보
팁
스케일링 이득을 포함한 CTF 형식의 필터를 구할 수 있습니다. butter, cheby1, cheby2, ellip와 같은 디지털 IIR 필터 설계 함수의 출력값을 사용하십시오. 이들 함수에서 "ctf" 필터 유형 인수를 지정하고 B, A, g를 반환하도록 지정하여 스케일 값을 구합니다. (R2024b 이후)
참고 문헌
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
확장 기능
버전 내역
R2006a 이전에 개발됨참고 항목
앱
함수
ctffilt|cceps|designfilt|digitalFilter|fft|freqz|hilbert|icceps|phasedelay|rceps