ROS 2 네트워크 연결 및 탐색
ROS 2에 연결하여 로보틱스 애플리케이션 프로토타입을 만들고, ROS 네트워크를 통해 로보틱스 하드웨어 또는 로보틱스 시뮬레이터에 액세스합니다. MATLAB®을 사용하여 자체 ROS 네트워크를 만들거나 기존 ROS 2 네트워크에 연결할 수 있습니다. ROS 2 네트워크를 설정하려면 먼저 ros2node 객체를 사용하여 ROS 2 노드를 생성합니다.
ros2param 객체와 객체 함수를 사용하여 ROS 2 파라미터에 액세스할 수 있습니다.
ros2rate 객체를 사용하여 코드 실행 타이밍을 제어할 수 있습니다.
또한 ROS 2 네트워크 분석기 앱을 사용하여 ROS 2 네트워크 그래프 전체를 포괄적으로 시각화할 수 있습니다.
앱
| ROS 2 네트워크 분석기 | ROS 2 네트워크에서 노드, 토픽, 서비스, 액션 간의 상호 작용 시각화 및 분석 (R2024b 이후) |
함수
객체
블록
| Blank Message | 지정된 메시지 유형을 사용해 빈 ROS 2 메시지 생성 |
| Current Time | 현재 ROS 2 시간 또는 시스템 시간 가져오기 (R2022b 이후) |
| Get Parameter | Get ROS 2 parameter value (R2022b 이후) |
도움말 항목
- Connect to ROS 2 Network and Establish Communication
Connect to ROS 2 network using nodes and establish communication through different interface types.
- Get Started with ROS 2 Network Analyzer App
Use ROS 2 Network Analyzer app to visualize and analyze nodes, topics, services and actions interaction in ROS 2 network. (R2024b 이후)
추천 예제

Switching Between ROS Middleware Implementations
Switch between different ROS 2 middleware implementations in MATLAB and Simulink®.

Use ROS Bridge to Establish Communication Between ROS and ROS 2
Control the TurtleBot3 in Gazebo using keyboard commands from MATLAB.

Access the tf Transformation Tree in ROS 2
Access tf Transformation Tree in ROS 2.
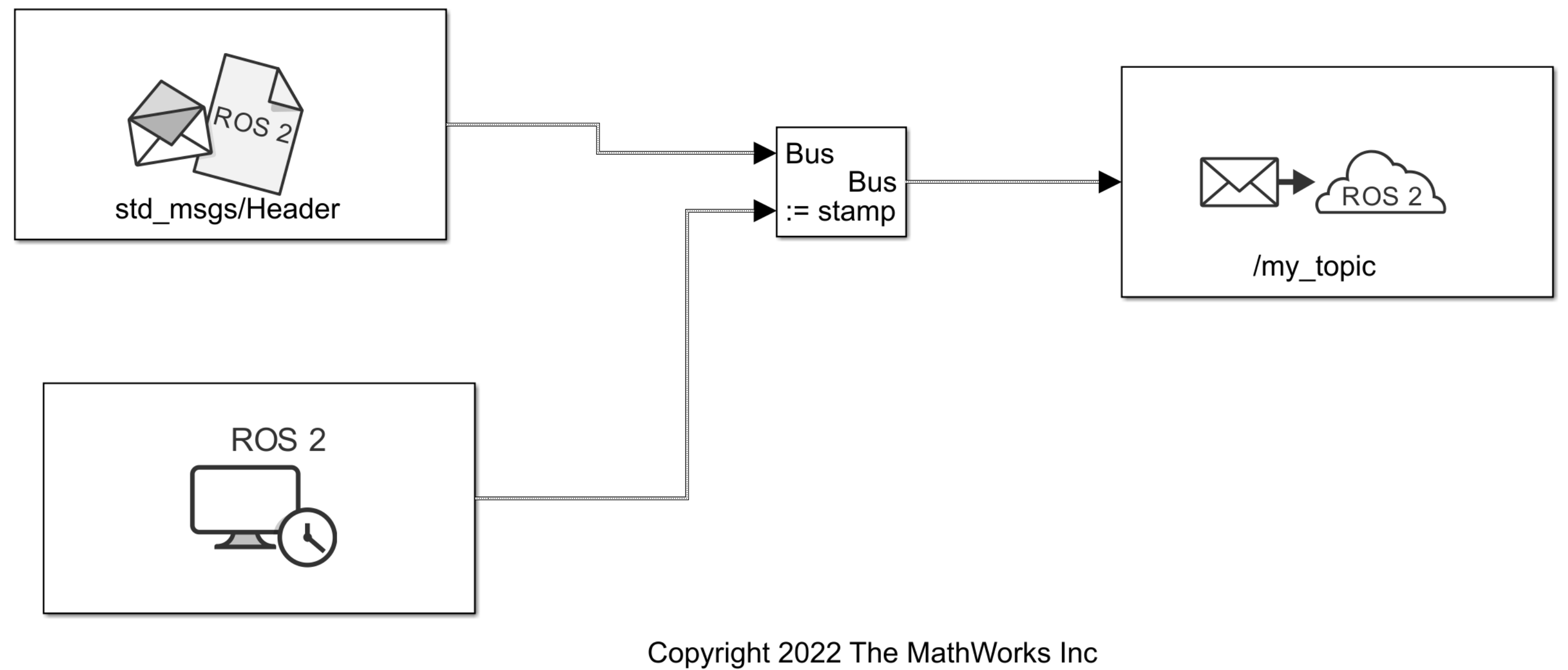
Time Stamp ROS 2 Message Using Current Time in Simulink
Time stamp a ROS 2 message with the current system time of your computer.