ROS 2 네트워크 분석기
설명
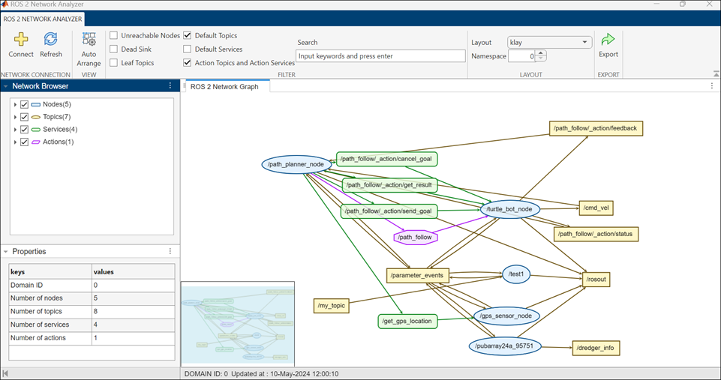
ROS 2 네트워크 분석기를 사용하면 ROS 2 네트워크의 전체 구조를 시각화하고, 네트워크 그래프에 포함된 모든 요소에 대한 핵심 정보, 즉 노드 이름과 노드 간 메시지 정보, ROS 2 노드(토픽, 서비스, 액세스)에 연결된 파라미터 간 상호 작용을 분석할 수 있습니다.
다음 이미지는 이 앱의 툴스트립을 보여줍니다.
앱 사용 방법:
MATLAB® 툴스트립의 앱 탭에서 ROS 2 네트워크 분석기 앱을 엽니다.
MATLAB 툴스트립에서 연결
 을 클릭하여 ROS 2 네트워크에 연결합니다.
을 클릭하여 ROS 2 네트워크에 연결합니다.ROS 2 도메인 ID를 제공하고 제출을 클릭합니다. 디폴트 도메인 ID는 0입니다. 그러면 시각화 도구에서 네트워크 그래프가 열립니다.
네트워크 브라우저 패널에는 다양한 요소들의 목록이 표시되고, 속성 패널에는 각 요소들의 개수 및 연결된 ROS 2 네트워크의 도메인 ID가 표시됩니다. 네트워크 브라우저에서 다음 요소를 개별적으로 선택하거나 선택 해제하여 그래프에서 해당 요소를 표시하거나 숨길 수 있습니다.
네트워크 브라우저 속성 
노드 — 연결된 ROS 2 네트워크의 모든 노드 나열

토픽 — 연결된 ROS 2 네트워크의 각 노드가 퍼블리시하고 서브스크라이브하는 모든 토픽 나열

서비스 — 노드에서 제공하는 모든 서비스(서비스-서버)와 노드가 클라이언트인 모든 서비스(서비스-클라이언트) 나열

액션 — 노드에서 제공하는 모든 액션(액션-서버)과 노드가 클라이언트인 모든 액션(액션-클라이언트) 나열
불러온 ROS 2 네트워크의 네트워크 브라우저에서 고급 필터 옵션을 활용하면, 전체 이름을 입력하지 않고도 선택한 엔터티와 연결된 노드, 토픽, 서비스, 액션을 효율적으로 필터링할 수 있습니다. 또한 메시지, 서비스, 액션의 인터페이스 유형을 기준으로 필터링할 수 있습니다.
검색 탭에 다음과 같은 표현을 입력하여 요구 사항에 맞게 네트워크를 더 세부적으로 필터링할 수 있습니다.
키워드 — camera 또는 GPS와 같은 특정 단어가 포함된 엔터티만 포함시킵니다.
정규 표현식 — 유연한 검색을 위해
.*camera.*또는gps.*와 같은 패턴을 사용하여 일치하는 엔터티를 찾습니다.제외 —
~debug및~camera와 같이 키워드 앞에 ~를 사용하여 해당 엔터티를 제외합니다.여러 개의 입력값 — 쉼표로 구분하여 여러 개의 필터를 입력합니다.
네트워크 캔버스에서 필터 지우기를 클릭하면 모든 고급 필터가 제거되고 디폴트 그래프를 다시 불러옵니다.
또한 네트워크 심도 옵션에 값을 추가하여 그래프에서 선택한 엔터티에 대해 표시되는 인접 엔터티의 개수를 수정할 수 있습니다.
새로 고침
 을 클릭하면, 새로 추가되거나 제거된 노드와 네트워크 브라우저 및 속성에 있는 모든 노드 요소가 반영되어 ROS 2 네트워크 그래프가 업데이트됩니다.
을 클릭하면, 새로 추가되거나 제거된 노드와 네트워크 브라우저 및 속성에 있는 모든 노드 요소가 반영되어 ROS 2 네트워크 그래프가 업데이트됩니다.요구 사항에 따라 시각화 창에서 원하는 요소를 클릭하고 끌어서 놓을 수 있습니다. 네트워크 그래프를 초기 뷰로 되돌리려면 앱 툴스트립에서 자동 정렬
 을 클릭합니다.
을 클릭합니다.원하는 시각화에 따라 핀치 메커니즘(손가락을 벌리거나 오므리기)을 사용하여 그래프를 확대하거나 축소하고, 클릭하여 누른 상태에서 그래프를 패닝할 수 있습니다.
시각화 창의 왼쪽 하단 코너에 있는 미니 맵을 사용하면 대규모 네트워크의 전체 구조를 볼 수 있으며, 현재 보이는 영역이 강조 표시됩니다. 미니 맵에서 아무 곳이나 클릭하여 네트워크 그래프를 패닝할 수 있기 때문에 간편한 탐색이 가능하며 원하는 영역을 선택하여 볼 수 있습니다.
그래프에서 원하는 요소를 선택하면 해당 요소의 모든 세부 정보를 속성 패널에서 확인할 수 있습니다.
다양한 검색 필터를 사용하여 그래프에 여러 요소를 표시하거나 숨길 수 있습니다.
특정 요구 사항에 따라 다양한 레이아웃을 사용하여 네트워크 그래프를 정렬하거나 네임스페이스를 기준으로 요소를 그룹화할 수 있습니다.
MATLAB 툴스트립에서 내보내기
 를 클릭하여 그래프 스냅샷을 이미지로 내보낼 수 있습니다.
를 클릭하여 그래프 스냅샷을 이미지로 내보낼 수 있습니다.
앱에 대한 안내를 보려면 이 비디오를 재생하십시오.
ROS 2 네트워크 분석기 앱 열기
MATLAB 툴스트립: 앱 탭의 로보틱스 및 자율 시스템에서 앱 아이콘
 을 클릭합니다.
을 클릭합니다.MATLAB 명령 프롬프트:
ros2NetworkAnalyzer를 입력합니다.