빈 메시지
지정된 메시지 유형을 사용해 빈 ROS 2 메시지 생성
라이브러리:
ROS Toolbox /
ROS 2
설명
Blank Message 블록은 선택한 ROS 메시지 유형에 상응하는 Simulink® 비가상 버스를 만듭니다. 이 블록은 Publish 블록, Subscribe 블록, Call Service 블록, Send Action Goal 블록과 작동하는 ROS 메시지 버스를 만듭니다.
예제
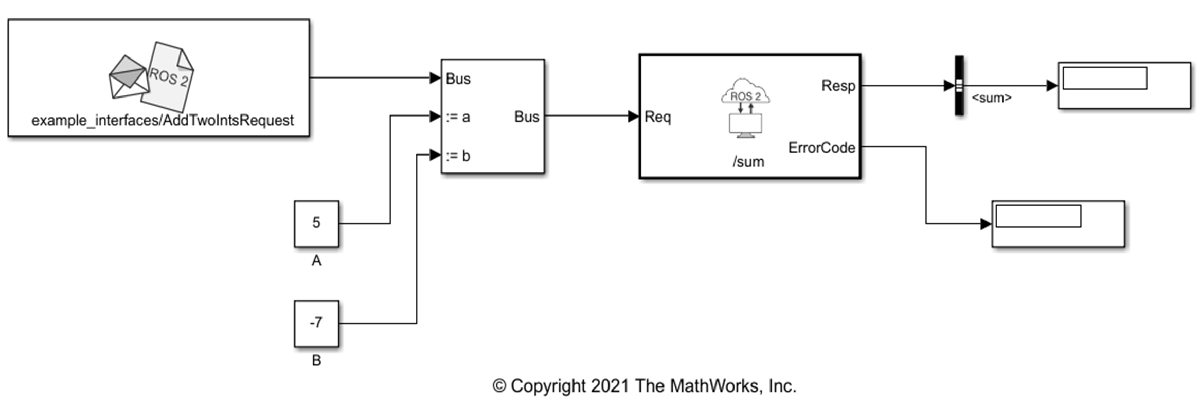
Call ROS 2 Service in Simulink
Call a service on the ROS 2 network in Simulink using the Call Service block and receive a response.
포트
출력
파라미터
확장 기능
버전 내역
R2019b에 개발됨