ROS 2 네트워크 액세스
ROS Toolbox는 기존 ROS 2 네트워크에 연결하는 인터페이스를 제공할 수 있으며, 또한 MATLAB 및 Simulink를 사용하는 데스크탑 시뮬레이션과 하드웨어 인터페이스를 위한 ROS 2 네트워크를 만들 수 있습니다. ROS 2 노드를 생성하거나 액세스하고 subscriber와 publisher를 사용하여 이들 노드 간의 통신을 설정할 수 있습니다. 또한 이 네트워크에서 ROS 2 파라미터와 변환을 생성하거나 액세스할 수 있습니다. ROS 2 노드에 대한 자세한 내용은 Connect to ROS 2 Network and Establish Communication 항목을 참조하십시오.
서비스 클라이언트로부터 요청을 받아 작업을 수행하고 응답을 전달하는 ROS 2 서비스 서버를 생성하거나 액세스할 수 있습니다. ROS 2 서비스에 대한 자세한 내용은 Explore ROS 2 Services: Service Client and Service Server Guide 항목을 참조하십시오.
또한 액션 클라이언트로부터 목표 실행 요청을 받고 목표 실행을 처리하는 동안 피드백을 전달하는 ROS 2 액션 서버를 생성하고 액세스할 수 있습니다. 자세한 내용은 Explore ROS 2 Actions: Action Client and Action Server Guide 항목을 참조하십시오.
카테고리
- ROS 2 네트워크 연결 및 탐색
ROS 2 네트워크 설정과 상호 작용
- MATLAB에서의 ROS 2 네트워크 액세스
MATLAB을 사용해 ROS 2 네트워크와 메시지에 액세스
- Simulink에서의 ROS 2 네트워크 액세스
Simulink를 사용해 ROS 2 네트워크와 메시지에 액세스
추천 예제

Call and Provide ROS 2 Services
Set up service servers to advertise a service to the ROS network. In addition, you will learn how to use service clients to call the server and receive a response.

Access the tf Transformation Tree in ROS 2
Access tf Transformation Tree in ROS 2.

Switching Between ROS Middleware Implementations
Switch between different ROS 2 middleware implementations in MATLAB and Simulink.
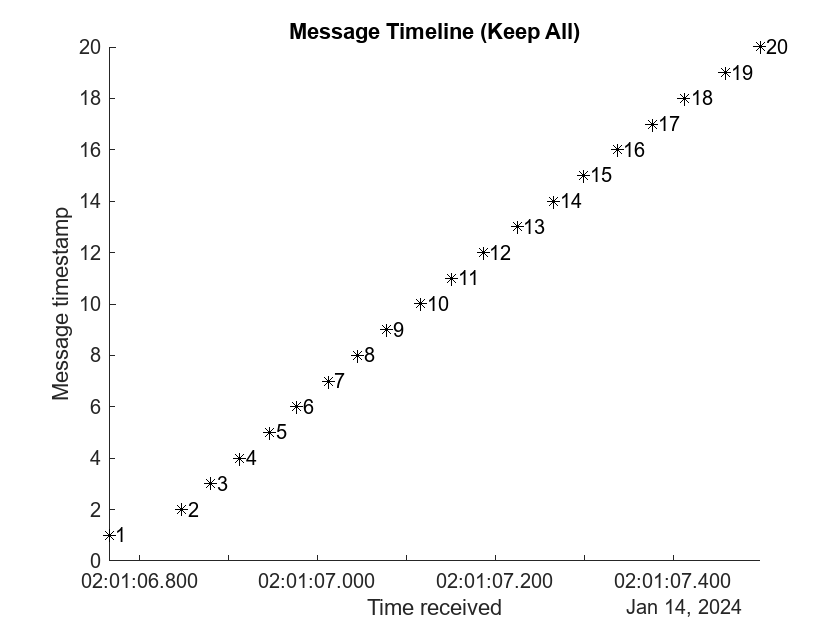
Manage Quality of Service Policies in ROS 2
Description of Quality of Service (QoS) policy options that allow changing the behavior of communication within a ROS 2 network.

Manage Quality of Service Policies in ROS 2 Application with TurtleBot
Demonstrates the best practices in managing Quality of Service (QoS) policies for an application using ROS 2.

Use ROS Bridge to Establish Communication Between ROS and ROS 2
Control the TurtleBot3 in Gazebo using keyboard commands from MATLAB.

ROS 2 Publisher 및 ROS 2 Subscriber를 사용해 데이터 교환하기
ROS 네트워크에서 토픽을 퍼블리시하고 서브스크라이브합니다.
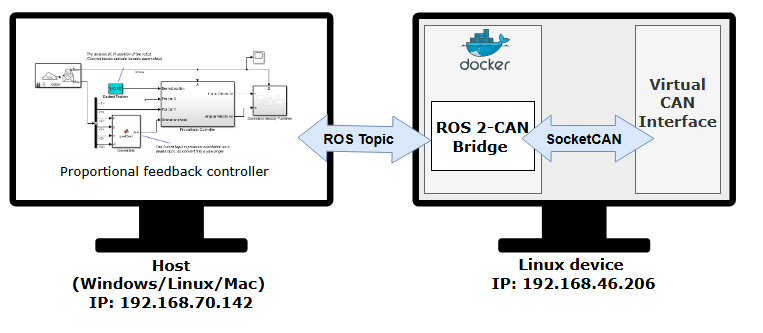
Send and Receive CAN Data in Simulink Using ROS 2-CAN Bridge Node
Design and test a feedback control algorithm in Simulink® using CAN messages exchanged between the CAN and ROS 2 network.
Plan Excavator Trajectory in ROS 2 Using Asynchronous Service Server
Use asynchronous ROS 2 service server in Simulink to plan and execute collision-free trajectories for a simulated autonomous excavator.