PID 제어기 조정
Control System Toolbox™는 PID 제어기를 조정하기 위한 몇 가지 툴과 명령을 제공합니다. 응용 분야에 가장 적합한 툴을 선택하려면 PID 제어기 설계 툴 선택하기 항목을 참조하십시오.
Simulink® 모델의 PID 제어기를 조정하는 방법에 대한 자세한 내용은 모델 기반 PID 제어기 조정 (Simulink Control Design) 항목을 참조하십시오.
앱
| PID 조정기 | PID 제어기 조정 |
라이브 편집기 작업
| PID 제어기 조정 | Tune PID Controller for LTI plant in the Live Editor |
함수
pidtune | 선형 플랜트 모델에 대한 PID 조정 알고리즘 |
pidtuneOptions | pidtune 함수에 대한 옵션 정의 |
getPIDLoopResponse | Closed-loop and open-loop responses of systems with PID controllers |
pidTuner | Open PID Tuner for PID tuning |
도움말 항목
PID 조정 기본 사항
- PID 제어기 설계 툴 선택하기
Control System Toolbox는 PID 제어기를 설계하기 위한 몇 가지 툴을 제공합니다. - PID 조정기를 사용하여 PID 제어기 설계하기
PID 조정기는 PID 제어기를 대화형 방식으로 자동 조정할 수 있습니다. - PID Controller Types for Tuning
Control System Toolbox PID tuning tools can generate and tune many PID and 2-DOF PID controller types.
대화형 방식 PID 조정
- 빠른 기준 추종을 위한 PID 제어기 설계
상승 시간 및 정착 시간 요구 사항을 충족하도록 PID 제어기를 조정합니다. - 기준 추종과 외란 제거 중 하나를 더 우선시하도록 PID 제어기 조정하기(PID 조정기)
PID 조정은 기준 추종 성능과 외란 제거 성능 사이를 상호 절충하는 과정입니다. 이 예제에서는 PID 조정기를 사용할 때 둘 중 하나를 더 우선시하도록 조정하는 방법을 보여줍니다. - PID Controller Design in the Live Editor
Use the Tune PID Controller task to generate code in the Live Editor for designing a PID controller for a linear plant model. - PID 조정기에서 설계 분석하기
PID 조정기는 PID 제어기를 조정하기 위한 시스템 응답 플롯 및 기타 툴을 제공합니다.
명령줄 PID 조정
- 명령줄에서 PID 제어기 설계
pidtune명령을 사용하여 PID 제어기를 프로그래밍 방식으로 조정합니다. - 기준 추종과 외란 제거 중 하나를 더 우선시하도록 PID 제어기 조정하기(명령줄)
명령줄에서pidtune명령의 조정 옵션을 사용하여 기준 추종이나 외란 제거 중에서 하나를 더 우선시하도록 합니다. - PI 제어기를 갖는 캐스케이드 제어 시스템 설계하기
pidtune명령을 사용하여 캐스케이드 제어 시스템을 위한 PI 제어기 두 개를 설계합니다.
측정된 응답 데이터로부터 PID 제어기 설계
- 응답 데이터에서 대화형 방식으로 플랜트 파라미터 추정하기
System Identification Toolbox™가 있는 경우에는 PID 조정기를 사용하여 시스템에서 측정한 응답 데이터를 바탕으로 선형 플랜트 모델을 추정할 수 있습니다. 그러면 PID 조정기가 결과 모델에 대해 PID 제어기를 조정합니다. - Tune PID Controller from Measured Plant Data in Live Editor
Use Live Editor Tasks to generate code for tuning a PID controller based on measured plant response. - PID 제어를 위한 시스템 식별
시스템 식별은 알려진 가진에 대한 시스템 응답을 기반으로 제어하려는 시스템의 동특성 표현을 추정하는 과정을 가리킵니다.
2자유도 PID 제어기
- Tune 2-DOF PID Controller (PID Tuner)
Design a two-degree-of-freedom (2-DOF) PID controller, and compare the controller performance with that of a 1-DOF PID controller. - Tune 2-DOF PID Controller (Command Line)
Design a two-degree-of-freedom (2-DOF) PID controller, and compare the controller performance with that of a 1-DOF PID controller.
Simulink에서의 조정
- Simulink에서 PID 제어기 조정하기
PID 조정기를 사용해서 PID Controller 블록의 이득을 조정하여 원하는 응답 시간을 달성하는 강인한 설계를 구현할 수 있습니다. - Design PID Controller Using Simulated I/O Data
This example shows how to tune a PID controller for plants that cannot be linearized. - Design PID Controller Using Estimated Frequency Response
When your plant cannot be linearized, you can estimate a plant model using frequency response estimation and import the plant model into PID Tuner.
PID 알고리즘
- PID 조정 알고리즘
PID 제어기를 조정하는 MathWorks® 알고리즘으로 성능과 강인성 사이의 균형이 이루어지도록 PID 이득을 조정합니다.
추천 예제

Design PID Controller for Disturbance Rejection Using PID Tuner
Design a PI controller with good disturbance rejection performance using the PID Tuner app. The example also shows how to design an ISA-PID controller for both good disturbance rejection and good reference tracking.

Temperature Control in Heat Exchanger
Design feedback and feedforward compensators to regulate the temperature of a chemical reactor through a heat exchanger.
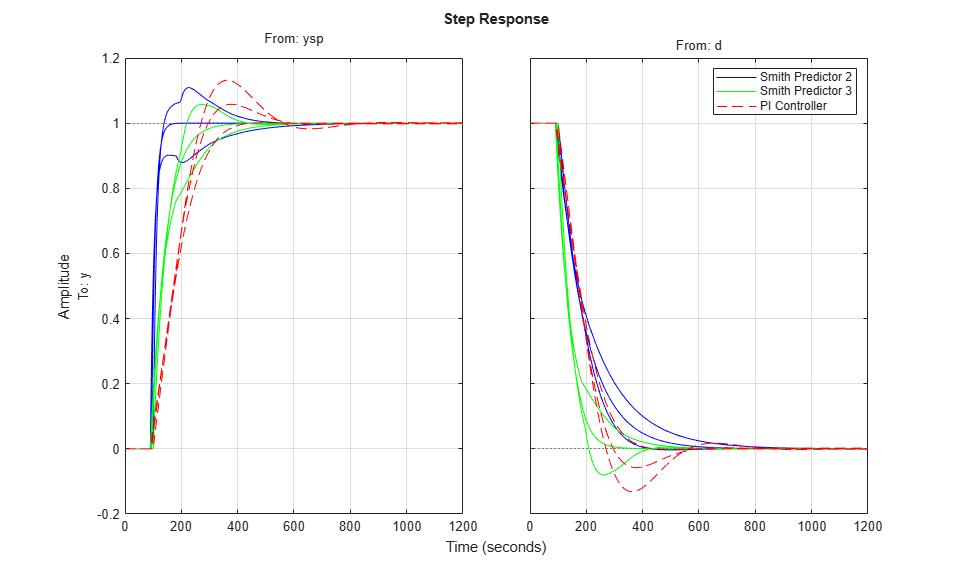
Control of Processes with Long Dead Time: The Smith Predictor
The limitations of PI control for processes with long dead time and illustrates the benefits of a control strategy called "Smith Predictor."