PID 조정기를 사용하여 PID 제어기 설계하기
Control System Toolbox™의 PID 조정기를 사용하여 LTI 모델로 표현되는 플랜트에 대해 PID 제어기를 대화형 방식으로 자동 조정할 수 있습니다.
PID 조정기를 사용하여 Simulink® 모델의 PID Controller 블록을 조정하는 방법에 대한 자세한 내용은 Simulink의 모델 기반 PID 조정 소개 (Simulink Control Design) 항목을 참조하십시오.
PID 조정기 개요
PID 조정기를 사용하여 단일 루프 음의 피드백 제어 구성에서 대화형 방식으로 SISO PID 제어기를 설계할 수 있습니다.

PID 조정기는 자동으로 플랜트에 대한 제어기를 설계합니다. 사용자는 제어기 유형(P, I, PI, PD, PDF, PID, PIDF)과 형식(병렬 또는 표준)을 지정합니다.
또한 PID 조정기를 사용하여 다음 그림과 같은 피드백 구성에서 2-DOF PID 제어기를 설계할 수 있습니다.
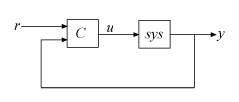
PID 조정기는 설정점 가중치가 조정 가능한 자유 파라미터일 수 있는 2-DOF PID 제어기를 설계할 수 있습니다. PID 조정기는 I-PD 및 PI-D와 같이 일반적인 제어 구성에서 설정점 가중치가 고정된 제어기를 설계할 수도 있습니다.
다양한 응답 플롯을 사용하여 설계를 분석하고, 성능 요구 사항에 맞게 대화형 방식으로 설계를 조정할 수 있습니다.
PID 조정기를 실행하려면 pidTuner 명령을 사용하십시오.
pidTuner(sys,type)
여기서 sys는 제어하려는 플랜트의 선형 모델이고 type은 설계할 제어기 유형을 나타냅니다.
또는 다음을 입력하십시오.
pidTuner(sys,Cbase)
여기서 Cbase는 기준 제어기로, 설계된 제어기의 성능을 Cbase의 성능과 비교할 수 있습니다.
sys 및 Cbase에 대한 자세한 내용은 pidTuner 도움말 페이지를 참조하십시오.
참고
PID 조정기는 MATLAB® 데스크탑의 앱 탭에서 열 수도 있습니다. 그럴 경우 PID 조정기의 플랜트 메뉴를 사용하여 플랜트 모델을 지정하십시오.
PID 제어기 유형
제어기 유형을 선택하려면 다음 방법 중 하나를 사용하십시오.
앱을 열 때 유형 지정하기 — PID 조정기를 열 때
pidTuner명령에type인수를 제공합니다. 예를 들어,pidTuner(G,'PIDF2')는 미분항에 필터가 있는 2-DOF PID 제어기를 초기 설계로 갖는 PID 조정기를 엽니다.기존 제어기 객체를 사용하여 유형 지정하기 — PID 조정기를 열 때
pidTuner명령에 기준 제어기Cbase인수를 제공합니다. PID 조정기가Cbase와 동일한 유형의 제어기를 설계합니다. 예를 들어,C0이 비례 동작과 미분 동작만 갖는pid제어기 객체라고 가정하겠습니다(PD 제어기). 이때pidTuner(G,C0)은 PD 제어기를 초기 설계로 갖는 PID 조정기를 엽니다.앱 내에서 제어기 유형 지정하기 — PID 조정기에서 유형 메뉴를 사용하여 제어기 유형을 변경합니다.
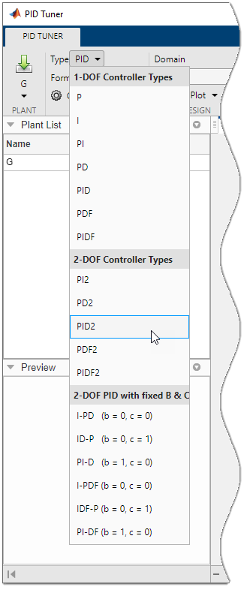
다음 표에는 사용 가능한 PID 제어기 유형이 요약되어 있습니다. 이러한 제어기 유형에 대한 자세한 내용은 PID Controller Types for Tuning 항목을 참조하십시오.
1-DOF 제어기
pidTuner에 대한 type 입력 | 유형 메뉴의 항목 | 제어기 동작 |
|---|---|---|
'P' | P | 비례만 |
'I' | I | 적분만 |
'PI' | PI | 비례와 적분 |
'PD' | PD | 비례와 미분 |
'PDF' | PDF | 비례와 미분. 미분항에 1차 필터 사용. |
'PID' | PID | 비례, 적분, 미분 |
'PIDF' | PIDF | 비례, 적분, 미분. 미분항에 1차 필터 사용. |
2-DOF 제어기
PID 조정기는 자유 설정점 가중치가 적용된 2-DOF PID 제어기 유형을 자동 설계할 수 있습니다. 다음 표에는 PID 조정기의 2-DOF 제어기 유형이 요약되어 있습니다. 일반적인 2-DOF PID 제어기에 대한 자세한 내용은 Two-Degree-of-Freedom PID Controllers 항목을 참조하십시오.
pidTuner에 대한 type 입력 | 유형 메뉴의 항목 | 제어기 동작 |
|---|---|---|
'PI2' | PI2 | 2-DOF 비례와 적분 |
'PD2' | PD2 | 2-DOF 비례와 미분 |
'PDF2' | PDF2 | 2-DOF 비례와 미분. 미분항에 1차 필터 사용. |
'PID2' | PID2 | 2-DOF 비례, 적분, 미분 |
'PIDF2' | PIDF2 | 2-DOF 비례, 적분, 미분. 미분항에 1차 필터 사용. |
고정된 설정점 가중치를 갖는 2-DOF 제어기
PID 조정기를 사용하여 다음 표에 요약되어 있는 고정 설정점 가중치 제어기 유형을 설계합니다. 이러한 제어기 유형에 대한 자세한 내용은 PID Controller Types for Tuning 항목을 참조하십시오.
pidTuner에 대한 type 입력 | 유형 메뉴의 항목 | 제어기 동작 |
|---|---|---|
'I-PD' | I-PD | b = 0, c = 0인 2-DOF PID |
'I-PDF' | I-PDF | b = 0, c = 0인 2-DOF PIDF |
'ID-P' | ID-P | b = 0, c = 1인 2-DOF PID |
'IDF-P' | IDF-P | b = 0, c = 1인 2-DOF PIDF |
'PI-D' | PI-D | b = 1, c = 0인 2-DOF PID |
'PI-DF' | PI-DF | b = 1, c = 0인 2-DOF PIDF |
이산시간 제어기 유형
sys가 샘플 시간이 Ts인 이산시간 모델인 경우 PID 조정기는 ForwardEuler 이산 적분기 식을 사용하여 이산시간 pid 제어기를 설계합니다. 다른 이산 적분기 식을 갖는 제어기를 설계하려면 다음 방법 중 하나를 사용하십시오.
실행 명령
pidTuner에 이산시간 기준 제어기Cbase를 제공합니다. PID 조정기는Cbase와 동일한 이산 적분기 식을 갖는 제어기를 설계합니다.PID 조정기를 실행한 후 옵션을 클릭하여 제어기 옵션 대화 상자를 엽니다. 적분식 메뉴와 도함수식 메뉴에서 이산 적분기 식을 선택합니다.
이산 적분기 식에 대한 자세한 내용은 pid, pid2, pidstd 및 pidstd2 도움말 페이지를 참조하십시오.
PID 제어기 형식
pidTuner에 type 입력을 사용하면 PID 조정기가 병렬 형식으로 제어기를 설계합니다. 표준 형식으로 제어기를 설계하려면 다음 방법 중 하나를 사용하십시오.
실행 명령
pidTuner에 표준 형식 기준 제어기Cbase를 제공합니다. PID 조정기가Cbase와 동일한 형식의 제어기를 설계합니다.PID 조정기를 실행한 후에 형식 메뉴를 사용하여 제어기 형식을 변경합니다.
병렬 및 표준 제어기 형식에 대한 자세한 내용은 pid, pid2, pidstd 및 pidstd2 도움말 페이지를 참조하십시오.