응답 데이터에서 대화형 방식으로 플랜트 파라미터 추정하기
이 예제에서는 PID 조정기를 사용하여, 측정된 SISO 응답 데이터에 선형 모델을 피팅하는 방법을 보여줍니다.
System Identification Toolbox™가 있는 경우에는 PID 조정기를 사용하여 시스템에서 측정한 시간 영역 응답 데이터를 바탕으로 선형 플랜트 모델의 파라미터를 추정할 수 있습니다. 그러면 PID 조정기가 추정된 결과 모델에 대해 PID 제어기를 조정합니다. PID 조정기에는 응답 데이터에 일치하도록 추정된 모델을 시각적으로, 수동으로 또는 자동으로 조정하는 몇 가지 기법이 있습니다. 이 예제에서는 이러한 기법 중 몇 가지를 소개합니다.
이 예제에서는 데이터 파일의 측정된 응답 데이터를 MATLAB® 작업 공간에 LTI 모델로 표현되어 있는 플랜트로 불러옵니다. Simulink® 모델에서 시뮬레이션된 데이터를 생성하는 방법에 대한 자세한 내용은 Interactively Estimate Plant from Measured or Simulated Response Data (Simulink Control Design) 항목을 참조하십시오.
측정된 응답 데이터 불러오기
이 예제에서 사용할 측정된 응답 데이터를 MATLAB® 작업 공간으로 불러옵니다.
load PIDPlantMeasuredIODataPID 조정기는 응답 데이터를 가져올 때 해당 측정된 데이터가 음의 피드백 루프에서 PID 제어기에 연결된 플랜트를 나타낸다고 가정합니다. 다시 말하면 PID 조정기는 시스템에 대해 다음과 같은 구조를 가정합니다. PID 조정기는 아래에 나와 있는 것처럼 사용자가 플랜트 입력 u에서 계단 신호를 주입했고 y에서 시스템 응답을 측정했다고 가정합니다.

이 예제의 샘플 데이터 파일은 각각 501×1 배열인 3개의 변수를 포함합니다. inputu는 응답 데이터를 얻기 위해 u에서 주입한 단위 계단 함수입니다. outputy는 y에서 측정된 시스템의 응답입니다. 시간 벡터 t는 0초에서 50초이며 샘플 시간은 0.1초입니다. inputu를 t와 비교하면 계단이 t = 5초에서 발생함을 알 수 있습니다.
숫자형 배열(이 예제의 경우처럼), timeseries 객체 또는 iddata 객체로 저장된 응답 데이터를 가져올 수 있습니다.
식별을 위해 응답 데이터 가져오기
PID 조정기를 엽니다.
pidTuner(tf(1),'PI')PID 조정기의 플랜트 메뉴에서
새 플랜트 식별을 선택합니다.
플랜트 식별 탭에서
 I/O 데이터 가져오기를 클릭하고 계단 응답을 선택합니다. 이 동작은 계단 응답 가져오기 대화 상자를 엽니다.
I/O 데이터 가져오기를 클릭하고 계단 응답을 선택합니다. 이 동작은 계단 응답 가져오기 대화 상자를 엽니다. 응답 데이터에 대한 정보를 입력합니다. 출력 신호는 측정된 시스템 응답
outputy입니다. 입력 계단 신호는 대화 상자의 다이어그램에 보이는 것처럼 파라미터화됩니다. 여기서 시작 지연 시간에5를 입력하고 샘플 시간에0.1을 입력합니다. 그런 다음 가져오기를 클릭합니다.
가져오기를 클릭합니다.
응답 데이터와 초기 추정된 플랜트의 응답이 플랜트 식별 플롯에 표시됩니다.
데이터 전처리하기
응답 데이터의 품질과 특징에 따라 추정된 플랜트 결과를 개선하기 위해 데이터에 대해 몇 가지 전처리를 수행해야 할 수 있습니다. PID 조정기는 오프셋 제거, 필터링, 데이터의 서브셋 추출과 같이 응답 데이터를 전처리하기 위한 몇 가지 옵션을 제공합니다. 이 예제에서는 응답 데이터가 오프셋을 갖습니다. 양호한 식별 결과를 얻으려면 데이터 오프셋을 제거하는 것이 중요합니다. 이를 위해 전처리 메뉴를 사용합니다. (다른 데이터 전처리 옵션에 대한 정보는 데이터 전처리하기 항목을 참조하십시오.)
플랜트 식별 탭에서
 전처리를 클릭하고
전처리를 클릭하고 오프셋 제거를 선택합니다. 오프셋 제거 탭이 열리고 응답 데이터의 시간 플롯과 그에 대응되는 입력 신호의 시간 플롯이 표시됩니다.다음 신호에서 오프셋 제거:를 선택하고 응답
출력값 (y)를 선택합니다. 제거할 오프셋: 텍스트 상자에서 값–2를 지정합니다. 신호 초기값 또는 신호 평균을 선택하거나 숫자형 값을 입력할 수도 있습니다. 오프셋이 적용된 신호를 보여주는 추가 선이 플롯에 업데이트됩니다.
 적용을 클릭하여 신호 변경 내용을 저장합니다.
적용을 클릭하여 신호 변경 내용을 저장합니다.  오프셋 제거 닫기를 클릭하여 플랜트 식별 탭으로 돌아갑니다.
오프셋 제거 닫기를 클릭하여 플랜트 식별 탭으로 돌아갑니다.PID 조정기가 자동으로 플랜트 파라미터를 조정하여 전처리된 응답 신호를 바탕으로 플랜트에 대한 새 초기 추측값을 만듭니다.
플랜트 구조와 파라미터 조정하기
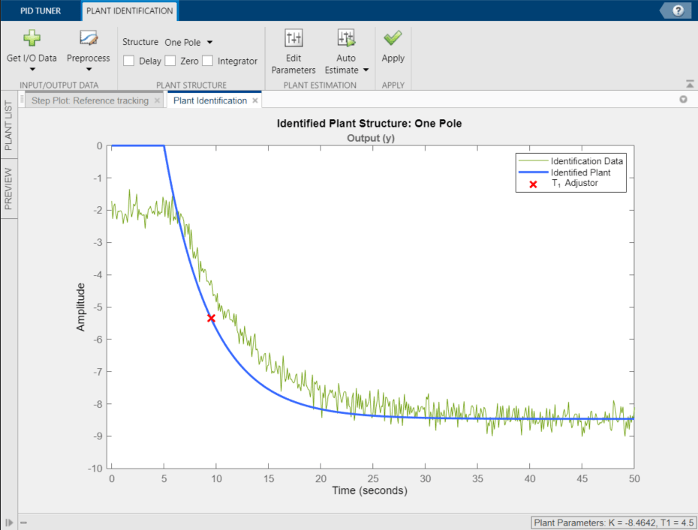
PID 조정기에서 1개 극점, 부족감쇠된 쌍, 상태공간 모델 같은 플랜트 구조를 지정할 수 있습니다. 구조 메뉴에서 응답에 가장 잘 일치하는 플랜트 구조를 선택합니다. 플랜트에 전송 지연, 영점 또는 적분기를 추가할 수도 있습니다. 이 예제에서는 1개 극점 구조가 정성적으로 올바른 응답을 제공합니다. 추정된 시스템 응답이 측정된 응답 데이터와 더 잘 일치하도록 플랜트 구조와 파라미터 값을 추가로 조정할 수 있습니다.
PID 조정기는 플랜트 파라미터를 조정하기 위한 몇 가지 방법을 제공합니다.
플롯에서 조정기를 끌어서 추정된 시스템의 응답을 시각적으로 조정합니다. 이 예제에서는 빨간색
x를 끌어서 추정된 플랜트 시정수를 조정합니다. 이렇게 하면 PID 조정기가 시스템 파라미터를 다시 계산합니다. 추정된 시스템 응답을 변경해 나감에 따라t= 5초에서의 계단 입력 적용과 이 계단 입력에 대한 시스템 응답 사이에 얼마간의 시간 지연이 있음을 알 수 있습니다.
추정된 플랜트 모델에 전송 지연을 추가하려면 플랜트 구조 섹션에서 지연을 선택하십시오. 플롯에 지연의 현재 값을 나타내는 세로선이 표시됩니다. 이 선을 왼쪽 또는 오른쪽으로 끌어서 지연을 변경하고, 빨간색
x를 끌어서 시스템 응답을 추가로 조정합니다.이득, 시정수, 시간 지연과 같은 시스템 파라미터의 숫자형 값을 조정합니다. 시스템 파라미터의 값을 수치적으로 조정하려면
 파라미터 편집을 클릭하십시오.
파라미터 편집을 클릭하십시오. 독립적인 측정을 통해 시스템의 전송 지연이 1.5초임을 알고 있다고 가정하겠습니다. 플랜트 파라미터 대화 상자에서 τ에 1.5를 입력합니다. 파라미터 값을 고정하려면 고정을 선택하십시오. 파라미터에 대해 고정을 선택하면 추정된 플랜트 모델에 대한 그래픽 조정과 자동 조정이 파라미터 값에 영향을 미치지 않게 됩니다.

측정된 응답 데이터와 일치하도록 시스템 파라미터를 자동으로 최적화합니다.
 자동 추정을 클릭하여 추정된 시스템 파라미터를 업데이트합니다. 이때 파라미터의 현재 값이 초기 추측값으로 사용됩니다.
자동 추정을 클릭하여 추정된 시스템 파라미터를 업데이트합니다. 이때 파라미터의 현재 값이 초기 추측값으로 사용됩니다.
계속해서 위 방법 중 아무거나 사용하여 추정된 시스템의 응답이 측정된 응답과 적절히 일치할 때까지 플랜트 구조와 파라미터 값을 조정할 수 있습니다.
플랜트를 저장하고 PID 제어기 조정하기
피팅에 만족하면 적용을 클릭합니다. 이렇게 하면 추정된 플랜트 Plant1이 PID 조정기 작업 공간에 저장됩니다. PID 조정기가 자동으로 Plant1에 대한 PI 제어기를 설계하고 계단 플롯: 기준 추종 플롯에 새 폐루프 응답을 표시합니다. 플랜트 목록 테이블에서 Plant1이 현재 제어기 설계로 선택되었음을 확인할 수 있습니다.

팁
PID 조정기 작업 공간에 저장된 변수를 검토하려면 플랜트 목록을 확인하십시오.

이제 PID 조정기 툴을 사용하여 추정된 플랜트에 대한 제어기 설계를 미세 조정하고 조정된 시스템 응답을 검토할 수 있습니다.
식별된 플랜트를 추가 분석을 위해 PID 조정기 작업 공간에서 MATLAB 작업 공간으로 내보낼 수도 있습니다. PID 조정기 탭에서  내보내기를 클릭합니다. MATLAB 작업 공간으로 내보낼 플랜트 모델을 선택합니다. 이 예제에서는 응답 데이터에서 식별한 플랜트인
내보내기를 클릭합니다. MATLAB 작업 공간으로 내보낼 플랜트 모델을 선택합니다. 이 예제에서는 응답 데이터에서 식별한 플랜트인 Plant1을 내보내겠습니다. 조정된 PID 제어기를 내보낼 수도 있습니다. 확인을 클릭합니다. 선택한 모델이 MATLAB 작업 공간에 저장됩니다.
식별된 플랜트 모델은 idproc (System Identification Toolbox) 또는 idss (System Identification Toolbox)와 같은 식별된 LTI 모델로 저장됩니다.
팁
또는 데이터 브라우저에서 플랜트를 마우스 오른쪽 버튼으로 클릭하여 조정을 위해 또는 MATLAB 작업 공간으로 내보내기 위해 선택합니다.
