pctransform
3차원 포인트 클라우드 변환
설명
ptCloudOut = pctransform(ptCloudIn,tform)tform을 포인트 클라우드 ptCloudIn에 적용합니다. 변환은 강체 변환, 유사 변환 또는 아핀 변환일 수 있습니다.
ptCloudOut = pctransform(ptCloudIn,D)D를 포인트 클라우드에 적용합니다. 변위 필드를 사용하는 포인트 클라우드 변환은 포인트 클라우드의 각 점을 기준으로 한 평행 이동을 정의합니다.
예제
포인트 클라우드를 읽어 들입니다.
ptCloud = pcread('teapot.ply');포인트 클라우드를 플로팅합니다.
figure pcshow(ptCloud) xlabel('X') ylabel('Y') zlabel('Z')

z축을 따라 45도 회전하는 변환 객체를 만듭니다.
rotationAngles = [0 0 45]; translation = [0 0 0]; tform = rigidtform3d(rotationAngles,translation);
포인트 클라우드를 변환합니다.
ptCloudOut = pctransform(ptCloud,tform);
변환된 포인트 클라우드를 플로팅합니다.
figure pcshow(ptCloudOut) xlabel('X') ylabel('Y') zlabel('Z')

이 예제에서는 3차원 포인트 클라우드에 강체 변환(회전)과 비강체 변환(전단)을 적용합니다.
포인트 클라우드를 작업 공간으로 읽어 들입니다.
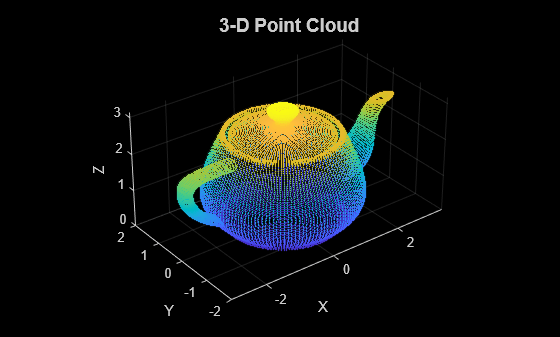
ptCloud = pcread('teapot.ply');원래의 3차원 포인트 클라우드를 플로팅합니다.
figure1 = figure; axes1 = axes(Parent=figure1); pcshow(ptCloud,Parent=axes1,AxesVisibility='on'); xlabel('X'); ylabel('Y'); zlabel('Z'); title('3-D Point Cloud',FontSize=14)
3차원 포인트 클라우드의 회전
z축 상에서 45도 회전을 정의하는 강체 변환 객체를 만듭니다.
rotationAngles = [0 0 45]; translation = [0 0 0]; tform = rigidtform3d(rotationAngles,translation);
포인트 클라우드를 변환합니다.
ptCloudOut1 = pctransform(ptCloud,tform);
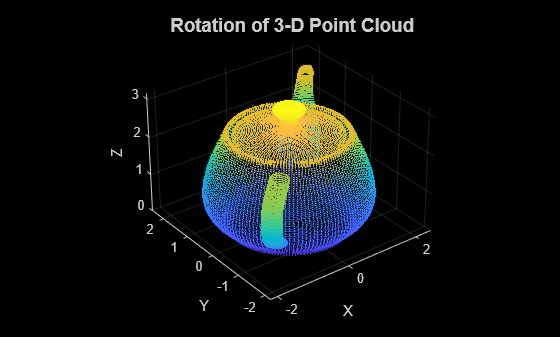
회전된 포인트 클라우드를 플로팅합니다.
figure2 = figure; axes2 = axes(Parent=figure2); pcshow(ptCloudOut1,Parent=axes2,AxesVisibility='on'); xlabel('X'); ylabel('Y'); zlabel('Z'); title({'Rotation of 3-D Point Cloud'},FontSize=14)
3차원 포인트 클라우드 전단
x축 상의 전단을 정의하는 아핀 변환 객체를 만듭니다.
A = [1 0.75 0.75 0; ... 0 1 0 0; ... 0 0 1 0; ... 0 0 0 1]; tform = affinetform3d(A);
포인트 클라우드를 변환합니다.
ptCloudOut2 = pctransform(ptCloud,tform);
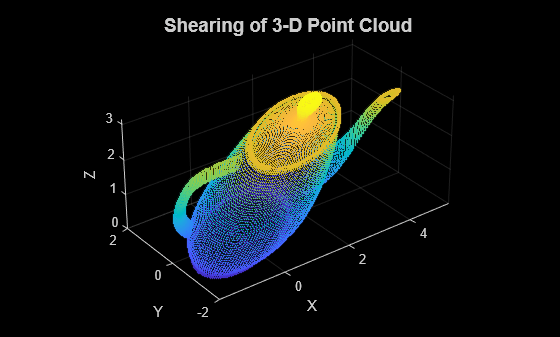
변환된 포인트 클라우드를 플로팅합니다.
figure3 = figure; axes3 = axes(Parent=figure3); pcshow(ptCloudOut2,Parent=axes3,AxesVisibility='on'); xlabel('X'); ylabel('Y'); zlabel('Z'); title({'Shearing of 3-D Point Cloud'},FontSize=14)
포인트 클라우드를 작업 공간으로 읽어 들입니다.
ptCloud = pcread('teapot.ply');포인트 클라우드와 같은 크기의 변위 필드 D를 만듭니다.
D = zeros(size(ptCloud.Location));
점의 첫 번째 절반에 대해 x축 상의 변위 필드 값을 7로 설정합니다.
pthalf = ptCloud.Count/2; D(1:pthalf,1) = 7;
pointCloud 방법 findNeighborsInRadius를 사용하여 관심 영역(ROI) 내 점들의 인덱스를 추출합니다. ROI 내 점들에 대해 x, y, z축 상의 변위 필드 값을 각각 4, 4, -2로 설정합니다.
indices = findNeighborsInRadius(ptCloud,[0 0 3.1],1.5); D(indices,1:2) = 4; D(indices,3) = -2;
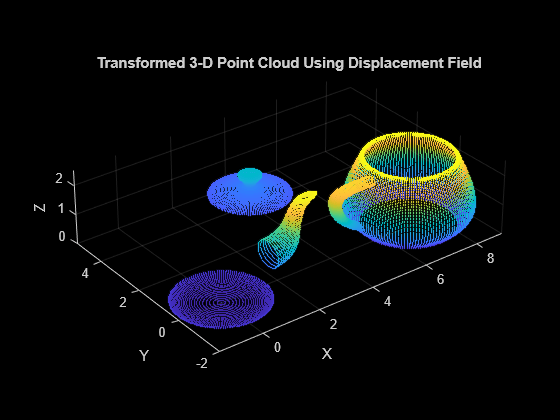
변위 필드를 사용하여 포인트 클라우드를 변환합니다.
ptCloudOut = pctransform(ptCloud,D);
원래 포인트 클라우드와 변환된 포인트 클라우드를 표시합니다.
figure pcshow(ptCloud) xlabel('X'); ylabel('Y'); zlabel('Z'); title('Original 3-D Point Cloud')
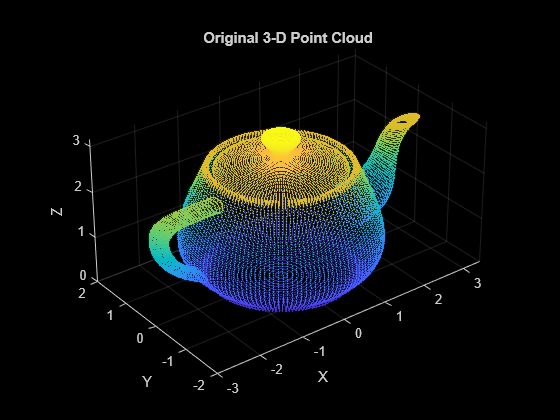
figure pcshow(ptCloudOut) xlabel('X'); ylabel('Y'); zlabel('Z'); title('Transformed 3-D Point Cloud Using Displacement Field')
입력 인수
출력 인수
확장 기능
버전 내역
R2015a에 개발됨참고 항목
객체
함수
pcplayer|pcshow|pcwrite|pcread|pcmerge|pcdownsample|pcfitplane|pcdenoise|pcregistericp|pccat|pcalign