pointCloud
3차원 포인트 클라우드를 저장하기 위한 객체
설명
생성
설명
ptCloud = pointCloud(___,Name=Value)Color=[1 0 0]은 포인트 클라우드의 색을 빨간색으로 설정합니다.
입력 인수
이름-값 인수
선택적 인수 쌍을 Name1=Value1,...,NameN=ValueN으로 지정합니다. 여기서 Name은 인수 이름이고 Value는 대응값입니다. 이름-값 인수는 다른 인수 뒤에 와야 하지만, 인수 쌍의 순서는 상관없습니다.
R2021a 이전 릴리스에서는 쉼표를 사용하여 각 이름과 값을 구분하고 Name을 따옴표로 묶으십시오.
예: Color=[1 0 0]은 포인트 클라우드의 색을 빨간색으로 설정합니다.
포인트 클라우드 색으로, 색 문자열, 1×3 벡터, M×3 배열 또는 M×N×3 배열 중 하나로 지정되는 RGB 값입니다. M×N은 포인트 클라우드의 차원을 지정합니다. 각 요소는 포인트 클라우드 데이터에 있는 점의 RGB 색을 지정합니다. 따라서 모든 점에 동일한 색을 지정하거나 각각의 점에 다른 색을 지정할 수 있습니다.
single또는double데이터형의 경우ColorRGB 값을 [0, 1] 범위로 지정해야 합니다.uint8데이터형의 경우ColorRGB 값을 [0, 255] 범위로 지정해야 합니다.uint16데이터형의 경우ColorRGB 값을 [0, 65535] 범위로 지정해야 합니다.이 함수는
Color값을 M×3 또는 M×N×3으로 저장합니다. 색을 문자열 또는 1×3 벡터로 지정하면 함수는 색을 다음의 차원 중 하나로 변환합니다.
| 색 | 형식 | 예 |
|---|---|---|
| 모든 점에 대해 하나의 색 지정 | string형 스칼라 또는 문자형 벡터 |
|
1×3 벡터 |
| |
| 각 점에 대해 색 지정 | M×3 행렬(RGB 값 목록으로 지정) | 255 0 0 255 0 0 0 255 255  |
각 점의 RGB 값이 포함된 정렬 포인트 클라우드를 나타내는 M×N×3 배열. 여기서 M×N은 포인트 클라우드의 차원입니다. |
|


데이터형: uint8 | uint16 | single | double
곡면 법선으로, M×3 또는 M×N×3 배열로 지정됩니다. 이 속성을 사용하여 포인트 클라우드의 각 점에 대한 법선 벡터를 지정합니다. 곡면 법선의 각 요소는 법선 벡터의 x, y, z 성분을 지정합니다.
| 좌표 | 곡면 법선 |
|---|---|
| M×3 배열 | M×3 배열. 여기서 각 행은 대응하는 법선 벡터를 포함합니다. |
| M×N×3 배열 | 각 점의 1×1×3 법선 벡터가 포함된 M×N×3 배열. |
데이터형: single | double
각 점에서의 회색조 명암으로, M×1 벡터 또는 M×N 행렬로 지정됩니다. 이 함수는 현재 컬러맵의 색 값에 각 명암 값을 매핑합니다.
| 좌표 | 명암 |
|---|---|
| M×3 배열 | M×1 벡터. 여기서 각 행은 대응하는 명암 값을 포함합니다. |
| M×N×3 배열 | 각 점의 명암 값이 포함된 M×N 행렬. |
데이터형: single | double | uint8 | uint16
출력 인수
속성
객체 함수
findNearestNeighbors | Find nearest neighbors of query points in point cloud |
findNeighborsInRadius | Find neighbors within radius for query points in point cloud |
findPointsInROI | Find points within a region of interest in the point cloud |
findPointsInCylinder | Find points within a cylindrical region in a point cloud |
removeInvalidPoints | Remove invalid points from point cloud |
select | Select points in point cloud |
copy | Copy array of point cloud objects |
예제
3차원 좌표 점을 작업 공간으로 읽어 들입니다.
load("xyzPoints");입력 점 좌표로부터 point cloud 객체를 만듭니다.
ptCloud = pointCloud(xyzPoints);
point cloud 객체의 속성을 검사합니다.
ptCloud
ptCloud =
pointCloud with properties:
Location: [5184×3 single]
Count: 5184
XLimits: [-3 3.4338]
YLimits: [-2 2]
ZLimits: [0.0016 3.1437]
Color: []
Normal: []
Intensity: []
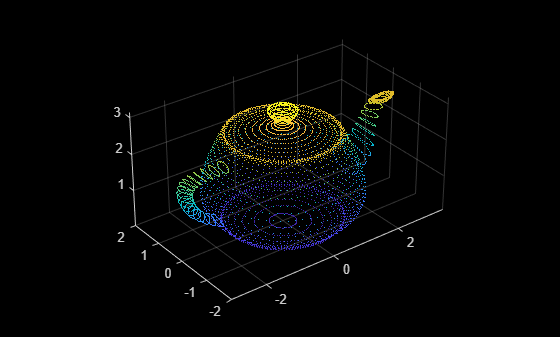
pcshow를 사용하여 포인트 클라우드를 표시합니다.
pcshow(ptCloud)
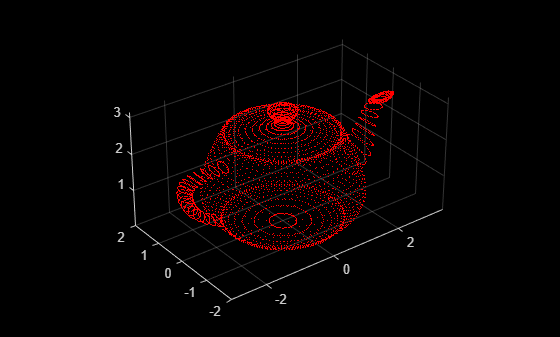
포인트 클라우드 데이터의 색 수정하기
포인트 클라우드 데이터와 동일한 크기의 RGB 색 배열을 만듭니다. 점 색을 빨간색으로 설정합니다.
cmatrix = ones(size(ptCloud.Location)).*[1 0 0];
색 속성이 RGB 색 배열로 설정된 point cloud 객체를 만듭니다.
ptCloud = pointCloud(xyzPoints,Color=cmatrix); pcshow(ptCloud)
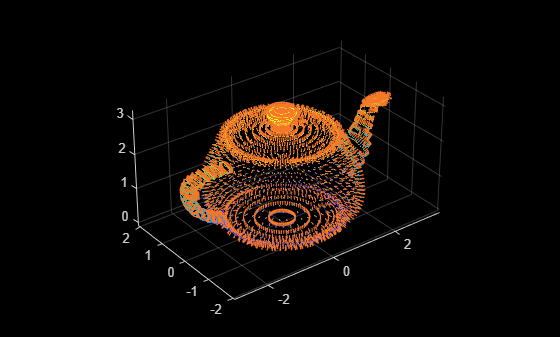
포인트 클라우드 데이터에 곡면 법선 추가하기
pcnormals를 사용하여 포인트 클라우드 데이터에 대응하는 곡면 법선을 계산합니다.
normals = pcnormals(ptCloud);
입력 점 좌표로부터 point cloud 객체를 만듭니다. 계산된 곡면 법선을 point cloud 객체에 추가합니다.
ptCloud = pointCloud(xyzPoints,Normal=normals);
포인트 클라우드를 표시하고 곡면 법선을 플로팅합니다.
pcshow(ptCloud) x = ptCloud.Location(:,1); y = ptCloud.Location(:,2); z = ptCloud.Location(:,3); u = normals(:,1); v = normals(:,2); w = normals(:,3); hold on quiver3(x,y,z,u,v,w); hold off
팁
pointCloud 객체는 handle 객체입니다. 포인트 클라우드의 개별 복사본을 만들기 위해 MATLAB® copy 메서드를 사용할 수 있습니다.
ptCloudB = copy(ptCloudA) |
포인트 클라우드 함수로 포인트 클라우드를 수정하고 그 사본 한 개만 유지하는 경우에는 입력 인수와 출력 인수에 동일한 포인트 클라우드 변수 이름을 사용하십시오.
ptCloud = pcFunction(ptCloud) |
확장 기능
버전 내역
R2015a에 개발됨참고 항목
함수
pccat|pcalign|pcshow|pcwrite|pcread|pcmerge|pcdenoise|pcnormals|pcfromkinect|reconstructScene|pcdownsample|pctransform|pcregistericp