planeModel
파라미터 평면 모델을 저장하기 위한 객체
설명
평면을 설명하는 파라미터를 기반으로 파라미터 평면 모델을 생성하고 저장합니다.
속성
객체 함수
plot | Plot parametric model |
normalRotation | Compute transform for rotation of normal to plane |
예제
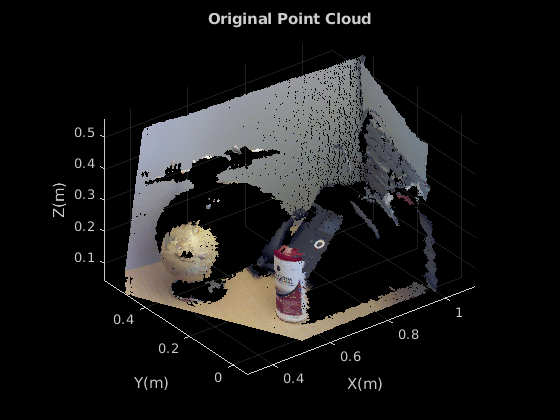
포인트 클라우드를 불러옵니다.
load("object3d.mat")포인트 클라우드를 표시하고 Figure에 레이블을 지정합니다.
figure pcshow(ptCloud) xlabel("X(m)") ylabel("Y(m)") zlabel("Z(m)") title("Original Point Cloud")
평면 피팅에 사용할 최대 점-평면 거리(2cm)를 설정합니다.
maxDistance = 0.02;
평면의 법선 벡터를 설정합니다.
referenceVector = [0,0,1];
최대 각거리를 5도로 설정합니다.
maxAngularDistance = 5;
첫 번째 평면인 테이블을 검출하고 포인트 클라우드에서 추출합니다.
[model1,inlierIndices,outlierIndices] = pcfitplane(ptCloud,...
maxDistance,referenceVector,maxAngularDistance);
plane1 = select(ptCloud,inlierIndices);
remainPtCloud = select(ptCloud,outlierIndices);관심 영역을 설정하여 두 번째 평면인 왼쪽 벽에 대한 탐색을 제한합니다.
roi = [-inf,inf;0.4,inf;-inf,inf]; sampleIndices = findPointsInROI(remainPtCloud,roi);
왼쪽 벽을 검출하고 남아 있는 포인트 클라우드에서 추출합니다.
[model2,inlierIndices,outlierIndices] = pcfitplane(remainPtCloud,...
maxDistance,SampleIndices=sampleIndices);
plane2 = select(remainPtCloud,inlierIndices);
remainPtCloud = select(remainPtCloud,outlierIndices);두 평면과 남아 있는 점을 플로팅합니다.
figure
pcshow(plane1)
title("First Plane")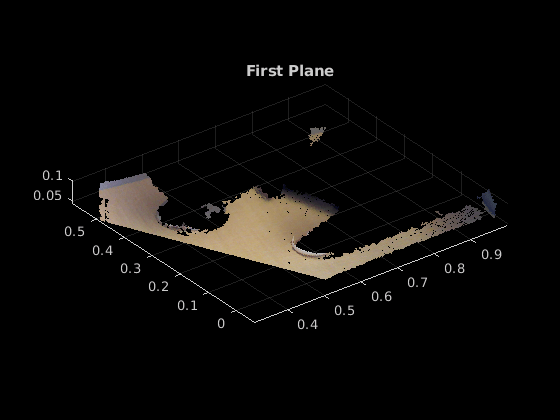
figure
pcshow(plane2)
title("Second Plane")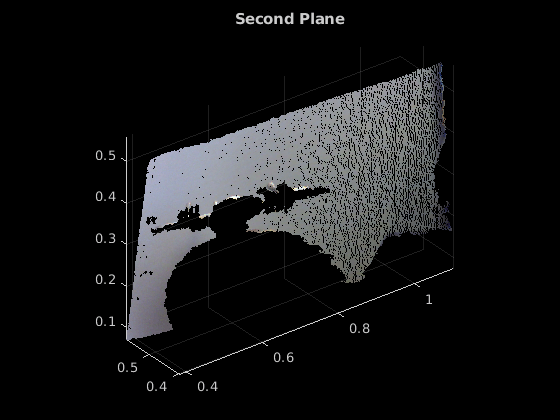
figure
pcshow(remainPtCloud)
title("Remaining Point Cloud")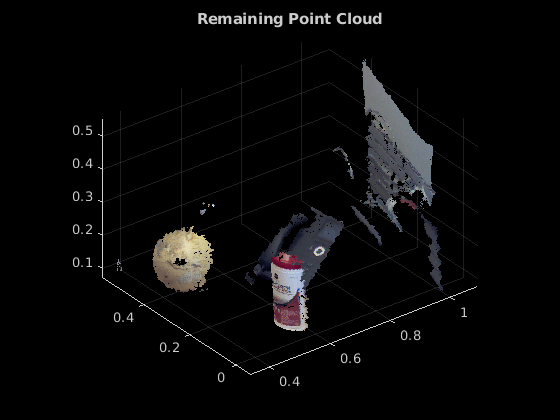
버전 내역
R2015b에 개발됨
참고 항목
객체
함수
pcfitcylinder|pcfitplane|pcfitsphere|pcshow|pcmerge|pctransform|pcdenoise|pcdownsample|pcwrite|pcread|pcregistericp