pcmerge
Merge two 3-D point clouds
Syntax
Description
ptCloudOut = pcmerge(ptCloudA,ptCloudB,gridStep)gridStep specifies the size of the 3-D box for the
filter.
ptCloudOut = pcmerge(___,GridFilter=gridFilterMethod)
Examples
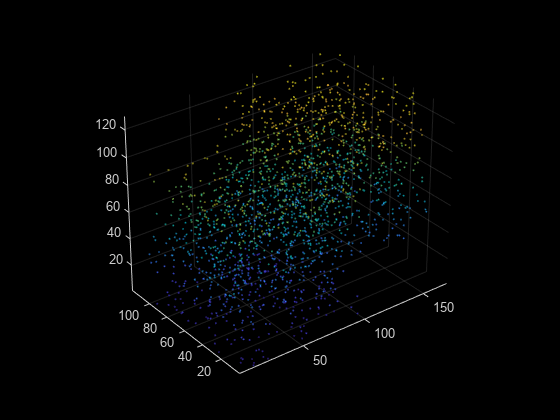
Create a point cloud with X, Y, Z points in [0, 100].
ptCloudA = pointCloud(100*rand(1000,3));
Create a partially overlapping point cloud.
ptCloudB = pointCloud([70 20 30] + 100*rand(1000,3));
Merge the two point clouds using a box filter.
ptCloudOut = pcmerge(ptCloudA, ptCloudB, 1); pcshow(ptCloudOut);
Input Arguments
Output Arguments
Tips
If the two point clouds do not have the same set of properties filled, such as
ColororNormal, these properties will be cleared in the returned point cloud. For example, ifptCloudAhas color butptCloudBdoes not, thenptCloudOutwill not contain color.The function filters out points with
NaNorInfvalues.
Extended Capabilities
Version History
Introduced in R2015a
See Also
Objects
pointCloud|planeModel|affine3d|rigid3d
Functions
pccat|pcalign|pcplayer|pcshow|pcwrite|pcread|pctransform|pcdownsample|pcfitplane|pcdenoise|pcregistericp