pcfitplane
3차원 포인트 클라우드에 평면 피팅
구문
설명
model = pcfitplane(ptCloudIn,maxDistance)
이 함수는 MSAC(M-estimator SAmple Consensus) 알고리즘을 사용하여 평면을 찾습니다. MSAC 알고리즘은 RANSAC(RANdom SAmple Consensus) 알고리즘의 변형입니다.
model = pcfitplane(ptCloudIn,maxDistance,referenceVector)referenceVector 입력값으로 방향 제약 조건을 지정하여 포인트 클라우드에 평면을 피팅합니다.
model = pcfitplane(ptCloudIn,maxDistance,referenceVector,maxAngularDistance)
[은 포인트 클라우드 입력값에 있는 정상값과 이상값 점에 대한 선형 인덱스를 추가로 반환합니다.model,inlierIndices,outlierIndices] = pcfitplane(___)
[은 위에 열거된 구문 중 하나를 사용하여 정상값 점부터 모델까지의 거리의 평균 오차를 추가로 반환합니다.model,inlierIndices,outlierIndices,meanError] = pcfitplane(___)
[___] = pcfitplane(___,는 위에 열거된 구문의 인수 조합 외에 하나 이상의 이름-값 인수를 사용하여 옵션을 지정합니다. 예를 들어 Name=Value)pcfitplane(ptCloud,maxDistance,referenceVector,maxAngularDistance,Confidence=95)는 최대 정상값 수를 찾기 위한 신뢰율을 95로 설정합니다.
예제
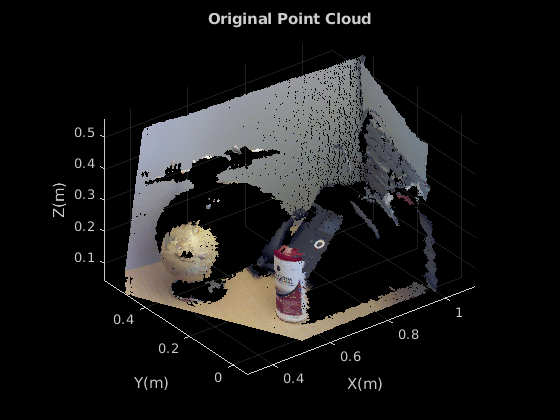
포인트 클라우드를 불러옵니다.
load("object3d.mat")포인트 클라우드를 표시하고 Figure에 레이블을 지정합니다.
figure pcshow(ptCloud) xlabel("X(m)") ylabel("Y(m)") zlabel("Z(m)") title("Original Point Cloud")
평면 피팅에 사용할 최대 점-평면 거리(2cm)를 설정합니다.
maxDistance = 0.02;
평면의 법선 벡터를 설정합니다.
referenceVector = [0,0,1];
최대 각거리를 5도로 설정합니다.
maxAngularDistance = 5;
첫 번째 평면인 테이블을 검출하고 포인트 클라우드에서 추출합니다.
[model1,inlierIndices,outlierIndices] = pcfitplane(ptCloud,...
maxDistance,referenceVector,maxAngularDistance);
plane1 = select(ptCloud,inlierIndices);
remainPtCloud = select(ptCloud,outlierIndices);관심 영역을 설정하여 두 번째 평면인 왼쪽 벽에 대한 탐색을 제한합니다.
roi = [-inf,inf;0.4,inf;-inf,inf]; sampleIndices = findPointsInROI(remainPtCloud,roi);
왼쪽 벽을 검출하고 남아 있는 포인트 클라우드에서 추출합니다.
[model2,inlierIndices,outlierIndices] = pcfitplane(remainPtCloud,...
maxDistance,SampleIndices=sampleIndices);
plane2 = select(remainPtCloud,inlierIndices);
remainPtCloud = select(remainPtCloud,outlierIndices);두 평면과 남아 있는 점을 플로팅합니다.
figure
pcshow(plane1)
title("First Plane")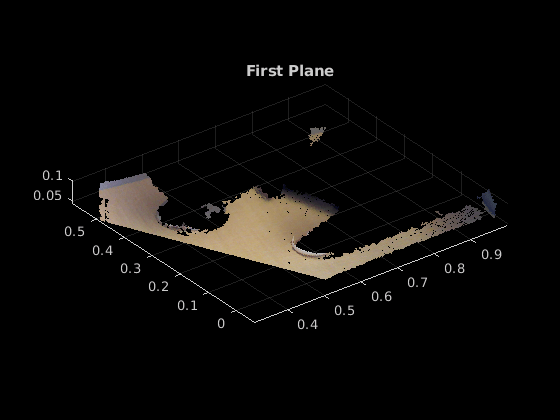
figure
pcshow(plane2)
title("Second Plane")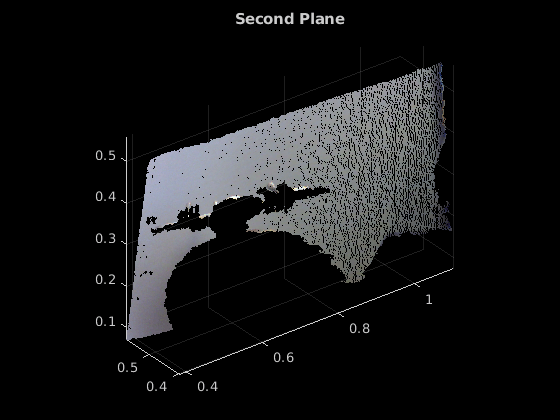
figure
pcshow(remainPtCloud)
title("Remaining Point Cloud")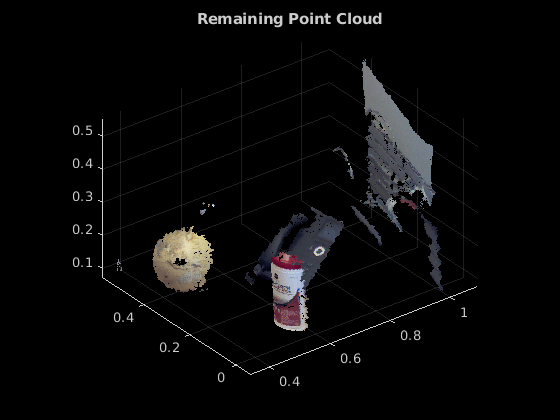
입력 인수
이름-값 인수
출력 인수
참고 문헌
[1] Torr, P. H. S., and A. Zisserman. “MLESAC: A New Robust Estimator with Application to Estimating Image Geometry.” Computer Vision and Image Understanding. 2000.
확장 기능
버전 내역
R2015b에 개발됨
참고 항목
객체
함수
pcshow|pcwrite|pcread|pcfitsphere|pcfitcylinder|findPointsInROI|pcmerge|pctransform|pcregistericp|pcdenoise