영상 처리 및 컴퓨터 비전
MathWorks®의 영상 처리 및 컴퓨터 비전 제품을 사용하면 데이터 수집 및 전처리부터 향상 및 분석, 임베디드 비전 시스템 배포에 이르는 전체 처리 워크플로를 수행할 수 있습니다.
이들 제품은 영상, 비디오, 포인트 클라우드, 라이다, 초분광 데이터를 위한 다양한 워크플로우를 지원합니다. 이러한 제품을 사용하여 다음을 수행할 수 있습니다.
앱을 사용하여 대화형 방식으로 데이터를 시각화, 탐색하고 데이터에 레이블을 지정하고 처리합니다.
알고리즘적으로 데이터를 개선하고 분석합니다.
딥러닝을 사용하여 의미론적 분할, 객체 검출, 분류 및 영상 간 변환을 수행합니다.
하드웨어와의 인터페이스를 통해 영상 수집, 알고리즘 가속화, 데스크탑 프로토타이핑 및 임베디드 비전 시스템 배포를 수행합니다.
영상 처리 및 컴퓨터 비전 관련 제품
Image Processing Toolbox
영상 처리, 시각화 및 분석
Computer Vision Toolbox
컴퓨터 비전 시스템 설계 및 테스트
Lidar Toolbox
라이다 처리 시스템 설계, 분석, 테스트
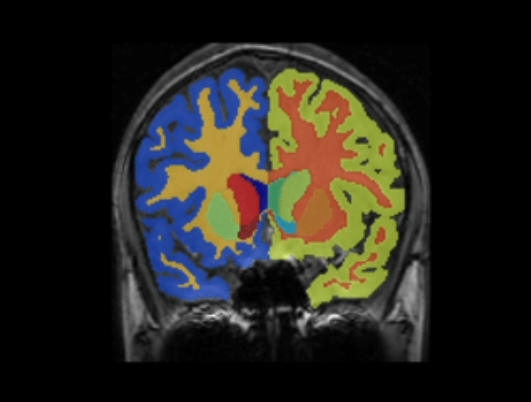
Medical Imaging Toolbox
2차원과 3차원 의료 영상 시각화, 정합, 분할 및 레이블 지정
Vision HDL Toolbox
Design image processing, video, and computer vision systems for FPGAs and ASICs
Image Acquisition Toolbox
산업 표준 하드웨어에서 이미지와 비디오 수집
도움말 항목
데이터에 레이블을 지정하고 전처리하기
- Ground Truth 데이터에 레이블을 지정할 앱 선택 (Computer Vision Toolbox)
ground truth 데이터에 레이블을 지정하기 위해 사용할 앱을 영상 레이블 지정기, 비디오 레이블 지정기, Ground Truth 레이블 지정기, 라이다 레이블 지정기, 신호 레이블 지정기 또는 의료 영상 레이블 지정기 중에서 선택합니다. - Get Started with Image Preprocessing and Augmentation for Deep Learning (Image Processing Toolbox)
Preprocess data for deep learning applications with deterministic operations such as resizing, or augment training data with randomized operations such as random cropping. - Medical Image Preprocessing (Medical Imaging Toolbox)
Learn common preprocessing steps used in medical image analysis. - 영상 정합 기법 선택하기 (Image Processing Toolbox)
정합 추정기 앱을 사용하여 영상을 정합하거나 자동화된 특징 매칭, 명암 기반 정합 또는 제어점 정합을 포함한 기법 중에서 선택합니다.
객체 및 특징 검출하기
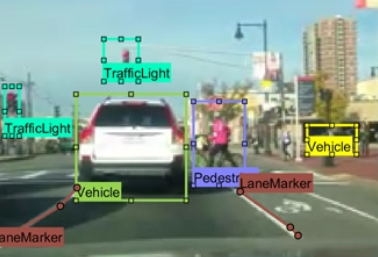
- Get Started with Object Detection Using Deep Learning (Computer Vision Toolbox)
Perform object detection using deep learning neural networks such as YOLOX, YOLO v4, RTMDet, and SSD. - Local Feature Detection and Extraction (Computer Vision Toolbox)
Learn the benefits and applications of local feature detection and extraction. - Object Detection in Point Clouds Using Deep Learning (Lidar Toolbox)
Detect 3-D bounding boxes for objects in a point cloud.
영상 및 포인트 클라우드 분할
- Get Started with Image Segmentation (Image Processing Toolbox)
Get started with tools for image segmentation, including Segment Anything Model, classical segmentation techniques, and deep learning-based semantic and instance segmentation. - Segment Objects Using Segment Anything Model (SAM) in Image Segmenter (Image Processing Toolbox)
Interactively segment objects or automatically segment the entire image using the Segment Anything Model (SAM) in the Image Segmenter app. (R2024b 이후) - Semantic Segmentation in Point Clouds Using Deep Learning (Lidar Toolbox)
Assign class labels to each point inside a point cloud using deep learning.
영상 필터링 및 분석
- Get Started with Image Filtering (Image Processing Toolbox)
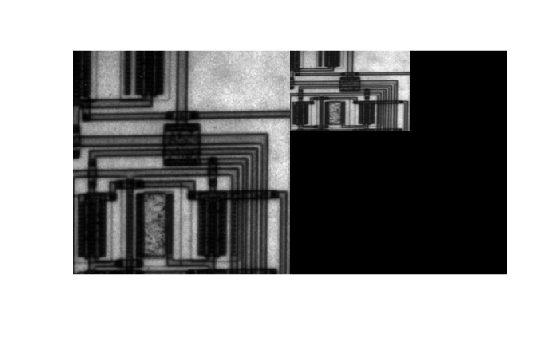
Get started with techniques for image filtering. - 대비 향상 기법 (Image Processing Toolbox)
명암 값 매핑, 히스토그램 평활화, 대비 제한 적응 히스토그램 평활화를 사용하여 회색조 영상과 컬러 영상의 대비를 조정합니다. - Calculate Properties of Image Regions Using Image Region Analyzer (Image Processing Toolbox)
Calculate the properties of regions in binary images and identify the region with the largest area by using the Image Region Analyzer app.
동시적 위치추정 및 지도작성 수행하기
- Choose SLAM Workflow Based on Sensor Data (Computer Vision Toolbox)
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
데이터 수집 및 보정하기
- Using the Single Camera Calibrator App (Computer Vision Toolbox)
Prepare camera calibration images and estimate camera intrinsic parameters. - 라이다-카메라 보정이란? (Lidar Toolbox)
라이다 데이터와 카메라 데이터를 융합합니다. - 영상 수집 탐색기 시작하기 (Image Acquisition Toolbox)
영상 수집 탐색기를 사용하여 이미지 데이터를 미리 보고, 구성하고, 수집하고, 저장합니다.
하드웨어에 배포하기
- Code Generation for Image Processing (Image Processing Toolbox)
Learn how to generate C code from Image Processing Toolbox™ functions using MATLAB® Coder™. - GPU 코드 생성 워크플로 (GPU Coder)
가속을 위해 생성된 CUDA MEX를 설계, 구현 및 검증하고 배포를 위해 독립 실행형 CUDA 코드를 설계, 구현 및 검증합니다. - Integrate YOLO v2 Vehicle Detector System on SoC (Vision HDL Toolbox)
Simulate a YOLO v2 vehicle detection algorithm that contains FPGA and ARM sections for deployment to an SoC device.
추천 예제
영상 크기 조정하기
승산식 스케일링 인자를 지정하거나 영상의 원하는 출력 크기를 지정하여 영상의 크기를 변경합니다.

Detect Nuclei in Large Whole Slide Images Using Cellpose
Detect cell nuclei in whole slide images (WSIs) of tissue stained using hematoxylin and eosin (H&E) by using Cellpose.

설명 가능한 FCDD 신경망을 사용하여 영상 이상 검출하기
이상 감지기를 사용하여 정상 알약과 비정상적인 흠집이 있거나 오염된 알약을 구별합니다.

Detect, Classify, and Track Vehicles Using Lidar
Detect, classify, and track vehicles by using lidar point cloud data captured by a lidar sensor mounted on an ego vehicle.

Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.

Segment CT Scan Using MONAI Label
Apply deep learning models from the Medical Open Network for AI (MONAI) Label platform to segment a CT scan.
비디오
컴퓨터 비전이란?
컴퓨터 비전이 객체 검출, 추적 및 인식을 포함한 다양한 응용 분야로 영상 처리를 어떻게 확장하는지 알아봅니다.

Lidar Toolbox란?
인식 및 내비게이션 응용 분야에서 포인트 클라우드 데이터 활용을 위한 Lidar Toolbox™ 기능을 알아봅니다.
의료 영상이란?
시각화, 정합, 분할, 레이블 지정을 포함한 Medical Imaging Toolbox™ 기능을 알아봅니다.