충돌 감지
충돌 지오메트리 메시, 충돌 회피, 여유 공간(clearance)
충돌 지오메트리는 로봇이 점유하는 물리적 공간과 그 주변 환경을 정의합니다. 로봇의 여러 부분이나 장애물을 표현하기 위해 상자, 원통, 구체 또는 사용자 지정 메시와 같은 collision 객체를 만듭니다. checkCollision 함수를 사용하면 궤적을 실행하는 동안 매니퓰레이터 팔의 여러 다른 부분이 자기들끼리 충돌하는지(자기 충돌) 또는 주변 세계의 장애물과 충돌하는지 확인할 수 있습니다. 이 함수는 또한 충돌을 예상하고 피하기 위해 확보해야 하는 장애물과의 여유 공간을 구합니다.
함수
블록
추천 예제
새로 만들기
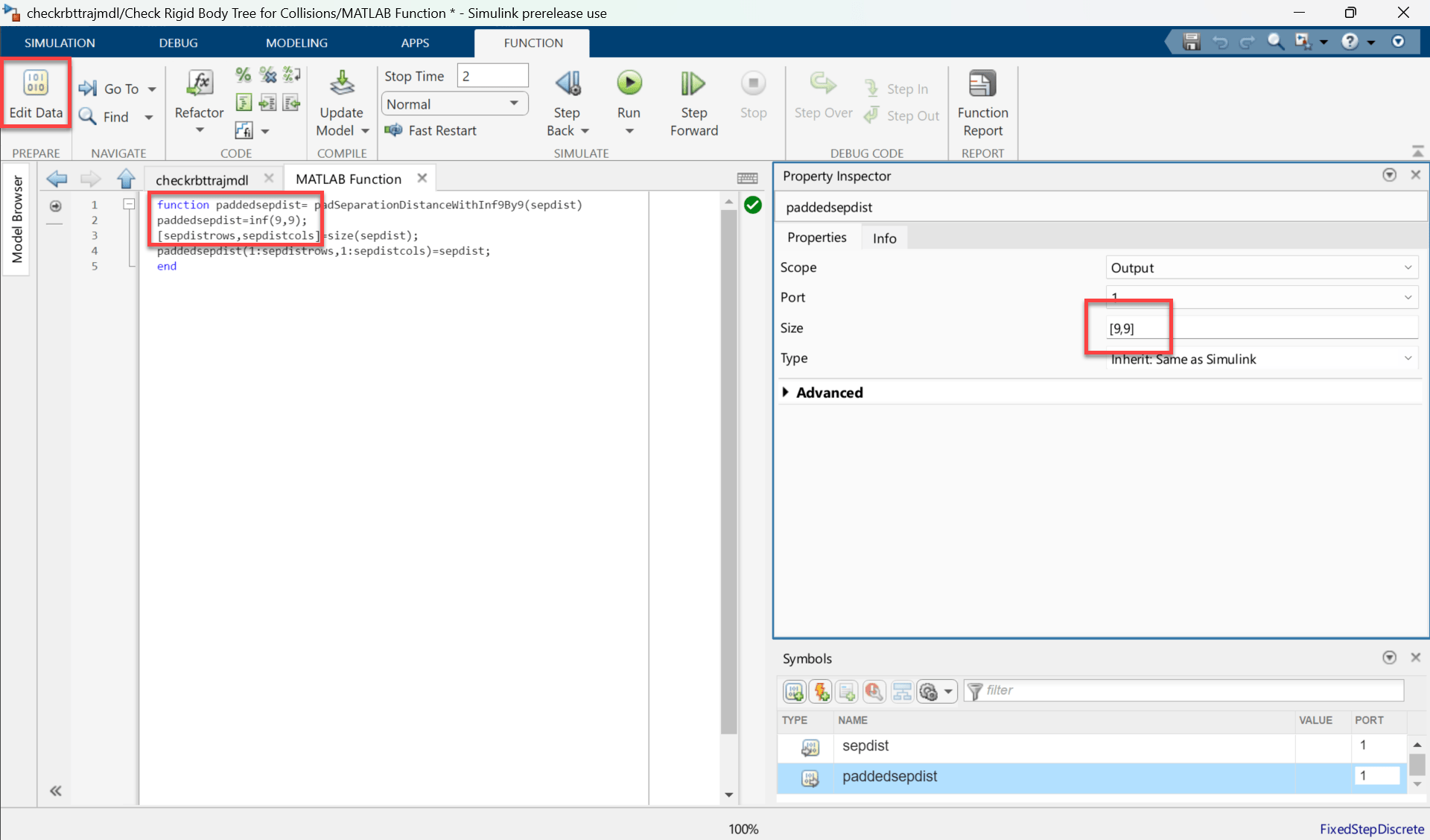
Check Rigid Body Tree Trajectories for Collisions in Simulink
Check self and world collisions of a rigid body tree given an input trajectory in Simulink® with dynamic world obstacles.

Check for Manipulator Self Collisions Using Collision Meshes
Check for self-collisions in KUKA® IIWA-14 serial manipulator using collision meshes from the URDF of the robot model.

Obtain Collision Data for Manipulator Collision Checking
Explore three different ways to obtain a rigid body tree model with collision data for manipulator collision checking.

Reduce Motion Planning Times Using Capsule Approximation
Use capsule approximation on rigid bodies to speed up motion planning using RRT.