이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
addCollision
강체에 충돌 기하 도형 추가
설명
addCollision(는 지정된 기하 유형과 파라미터의 충돌 기하 도형을 지정된 강체에 추가합니다.body,type,parameters)
addCollision(는 충돌 기하 도형 객체를 강체에 추가합니다. collision 객체는 다음 중 하나로 지정됩니다. body,collisionObj)
이 구문은 강체 프레임을 기준으로 tform*collisionObj.Pose의 상대 자세에서 충돌 기하 도형을 연결합니다.
addCollision(___,은 위에 열거된 구문의 입력 인수 조합 외에 강체 프레임을 기준으로 하는 충돌 기하 도형의 변환을 지정합니다.tform)
예제
로봇 모델을 불러와서 충돌 메시를 수정합니다. 기존 충돌 메시를 지우고, 단순한 collision 객체 프리미티브를 추가하고, 특정 컨피규레이션이 충돌하는지 확인합니다.
로봇 모델 불러오기
loadrobot 함수를 사용하여 사전 구성된 로봇 모델을 작업 공간에 불러옵니다. 이 모델에는 이미 각 바디에 지정된 충돌 메시가 있습니다. 모든 강체 요소를 반복하고 기존 충돌 메시를 지웁니다. 기존 메시가 사라졌는지 확인합니다.
robot = loadrobot("kukaIiwa7",DataFormat="column"); for i = 1:robot.NumBodies clearCollision(robot.Bodies{i}) end show(robot,Collisions="on",Visuals="off");

충돌 원통 추가하기
충돌 원통을 각 바디에 반복적으로 추가합니다. 이 특정 모델의 일부 바디는 중첩되고 항상 엔드 이펙터(바디 10)와 충돌하므로 건너뜁니다.
collisionObj = collisionCylinder(0.05,0.25); for i = 1:robot.NumBodies if i > 6 && i < 10 % Skip these bodies. else addCollision(robot.Bodies{i},collisionObj) end end show(robot,Collisions="on",Visuals="off");

충돌 검사하기
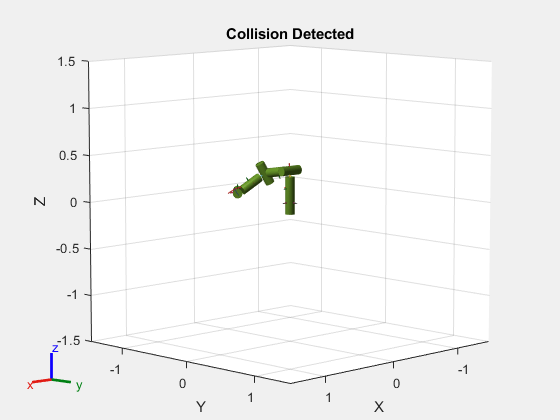
일련의 무작위 컨피규레이션을 생성합니다. 각 컨피규레이션에서 로봇이 충돌하는지 검사합니다. 충돌이 있는 각 컨피규레이션을 시각화합니다.
figure rng(0) % Set random seed for repeatability. for i = 1:20 config = randomConfiguration(robot); isColliding = checkCollision(robot,config,SkippedSelfCollisions="parent"); if isColliding show(robot,config,Collisions="on",Visuals="off"); title("Collision Detected") else % Skip non-collisions. end end
입력 인수
확장 기능
버전 내역
R2020b에 개발됨참고 항목
addVisual | checkCollision | clearCollision | clearVisual | show | rigidBodyTree