역기구학
역기구학(IK)은 원하는 엔드 이펙터의 위치를 구현하기 위한 로봇 모델의 조인트 컨피규레이션을 결정합니다. 로봇 기구학의 제약 조건은 조인트 간의 변환을 기반으로 rigidBodyTree 로봇 모델에 지정됩니다. 일반화된 역기구학을 사용하여 제약 조건을 만족하는 구성을 구할 수 있습니다. 예를 들어, 카메라 팔의 조준 제약 조건을 지정하거나 강체 링크에 카테시안 경계 상자를 지정할 수 있습니다. GIK 로봇 제약 조건 객체를 사용하여 이러한 제약 조건에 대한 파라미터를 지정해서 generalizedInverseKinematics 객체에 전달합니다.
역기구학에 대한 자세한 내용은 역기구학이란? 문서를 참조하십시오.
앱
| 역기구학 디자이너 | Design inverse kinematics solvers, configurations, and waypoints (R2022a 이후) |
함수
블록
| Inverse Kinematics | 엔드 이펙터 자세를 구현하기 위한 조인트 컨피규레이션 계산 |
도움말 항목
- 역기구학 알고리즘
역기구학 솔버 알고리즘과 역기구학 솔버 파라미터의 설명
- Inverse Kinematics for Robots with Floating Base
Calculate inverse kinematics for floating-base systems such as manipulators in space. (R2024a 이후)
- Trajectory Control Modeling with Inverse Kinematics
Drive a manipulator along a specified trajectory using the Simulink® Inverse Kinematics block.
추천 예제
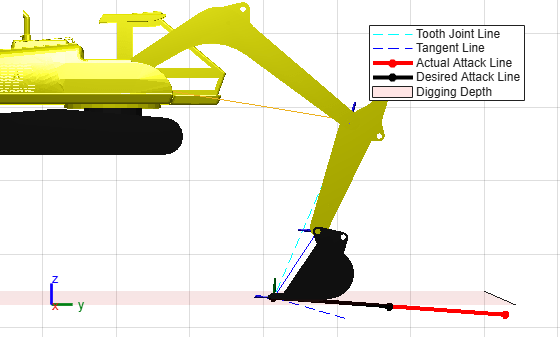
Constrain Links of Excavator for Earth Moving
Solve joint angles for excavator digging, grading, and unloading trajectories with GIK.
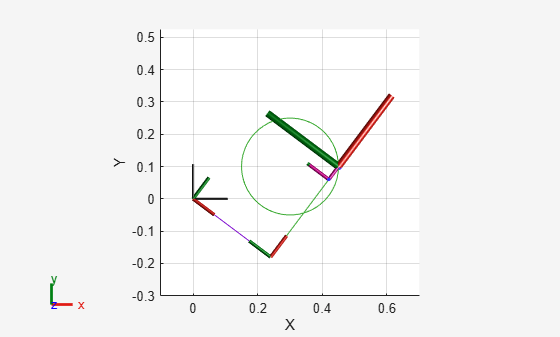
역기구학을 사용하여 2차원 경로 추적하기
단순한 2차원 매니퓰레이터의 역기구학을 계산합니다.

Solve Inverse Kinematics for Closed Loop Linkages
Model closed-loop linkages like four-bar systems using constraints with an inverse kinematics solver.
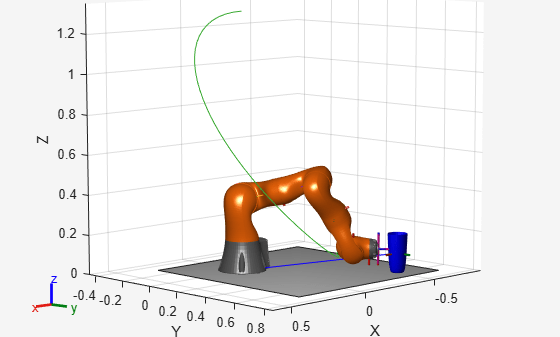
여러 기구학적 제약 조건을 가진 도달 궤적 계획하기
일반화된 역기구학을 사용하여 그리퍼가 정확하게 접근하도록 하기 위한 제약 조건이 있는 매니퓰레이터 궤적을 계획합니다.

Plan Manipulator Path for Dispensing Task Using Inverse Kinematics Designer
Design a collision-free manipulator path for adhesive dispensing using Inverse Kinematics Designer app.
교육 관련 자료

로봇 매니퓰레이터
좌표계 변환, DH 파라미터, 정기구학/역기구학을 통해 로봇 팔 모션의 개념을 알아봅니다.