쿼터니언
쿼터니언 배열 생성
설명
쿼터니언은 3차원 회전 및 방향에 사용되는 네 개 부분으로 구성된 초복소수입니다.
쿼터니언 수는 형식으로 표현됩니다. 여기서 a, b, c, d 부분은 실수이고, i, j, k는 방정식 i2 = j2 = k2 = ijk = −1을 충족하는 기저 요소입니다.
H로 표시되는 쿼터니언 세트는 실수에 대한 4차원 벡터 공간인 R4 내에서 정의됩니다. H의 모든 요소는 기저 요소 i, j, k의 선형 결합을 기반으로 고유한 표현을 갖습니다.
3차원의 모든 회전은 회전 축과 그 축을 중심으로 한 각도로 설명할 수 있습니다. 회전 행렬에 비해 쿼터니언의 장점은 회전 축과 회전 각도를 쉽게 해석할 수 있다는 것입니다. 예를 들어 R3의 한 점을 생각해 보십시오. 이 점을 회전시키려면 회전 축과 회전 각도를 정의합니다.

회전의 쿼터니언 표현은 로 나타낼 수 있으며, 여기서 θ는 회전 각도이고 [ub, uc, ud]는 회전 축을 나타냅니다.
생성
구문
설명
quat = quaternion()
quat = quaternion(A,B,C,D)A, B, C, D에서 네 가지 쿼터니언 부분을 가져오는 쿼터니언 배열을 생성합니다. 모든 입력값은 크기와 데이터형이 동일해야 합니다.
quat = quaternion(RV,"rotvec")RV에서 N×1 쿼터니언 배열을 생성합니다. RV의 각 행은 라디안 단위의 회전 벡터를 나타냅니다.
quat = quaternion(RV,"rotvecd")RV에서 N×1 쿼터니언 배열을 생성합니다. RV의 각 행은 도 단위의 회전 벡터를 나타냅니다.
quat = quaternion(transformation)transformation에서 쿼터니언 배열을 생성합니다.
quat = quaternion(rotation)rotation에서 쿼터니언 배열을 생성합니다.
입력 인수
쿼터니언의 부분으로, 크기가 동일한 4개의 스칼라, 행렬 또는 다차원 배열로 지정되며 쉼표로 구분됩니다.
예: quat = quaternion(1,2,3,4)는 1 + 2i + 3j + 4k 형식의 쿼터니언을 생성합니다.
예: quat = quaternion([1,5],[2,6],[3,7],[4,8])은 quat(1,1) = 1 + 2i + 3j + 4k와 quat(1,2) = 5 + 6i + 7j + 8k인 1×2 쿼터니언 배열을 생성합니다
데이터형: single | double
쿼터니언 부분으로 구성된 행렬로, N×4 행렬로 지정됩니다. 각 행은 개별 쿼터니언을 나타냅니다. 각 열은 개별 쿼터니언 부분을 나타냅니다.
예: quat = quaternion(rand(10,4))는 10×1 쿼터니언 배열을 생성합니다.
데이터형: single | double
회전 벡터로 구성된 행렬로, N×3 행렬로 지정됩니다. RV의 각 행은 회전 벡터의 [X Y Z] 요소를 나타냅니다. 회전 벡터는 라디안 단위 또는 도 단위의 회전 각도에 의해 스케일링된 회전 축을 나타내는 단위 벡터입니다.
이 구문을 사용하려면 첫 번째 인수를 회전 벡터로 구성된 행렬로 지정하고 두 번째 인수를 "rotvec" 또는 "rotvecd"로 지정하십시오.
예: quat = quaternion(rand(10,3),"rotvec")는 10×1 쿼터니언 배열을 생성합니다.
데이터형: single | double
회전 행렬로 구성된 배열로, 3×3 행렬 또는 3×3×N 배열로 지정됩니다. 배열의 각 페이지는 개별 회전 행렬을 나타냅니다.
예: quat = quaternion(rand(3),"rotmat","point")
예: quat = quaternion(rand(3),"rotmat","frame")
데이터형: single | double
회전 행렬의 유형으로, "point" 또는 "frame"으로 지정됩니다.
예: quat = quaternion(rand(3),"rotmat","point")
예: quat = quaternion(rand(3),"rotmat","frame")
데이터형: char | string
오일러 각으로 구성된 행렬로, N×3 행렬로 지정됩니다. "euler" 구문을 사용하는 경우 E를 라디안 단위로 지정합니다. "eulerd" 구문을 사용하는 경우 E를 도 단위로 지정합니다.
예: quat = quaternion(E,"euler","YZY","point")
예: quat = quaternion(E,"euler","XYZ","frame")
데이터형: single | double
회전 시퀀스로, 요소를 3개 가진 문자형 벡터로 지정됩니다.
"YZY""YXY""ZYZ""ZXZ""XYX""XZX""XYZ""YZX""ZXY""XZY""ZYX""YXZ"
좌표계가 프레임 회전을 사용하여 회전할 때 점의 새 좌표를 결정하려 한다고 가정하겠습니다. 점은 원래 좌표계에서 다음과 같이 정의됩니다.
point = [sqrt(2)/2,sqrt(2)/2,0];
오일러 각 표현 [45,45,0]을 사용하여 점을 회전하려고 합니다. 두 가지 다른 회전 시퀀스를 사용하여 점을 회전합니다.
쿼터니언 회전자를 만들고 "ZYX" 시퀀스를 지정하면 프레임은 먼저 z축을 중심으로 45도 회전한 다음 새로운 y축을 중심으로 45도 회전합니다.
quatRotator = quaternion([45,45,0],"eulerd","ZYX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.7071 -0.0000 0.7071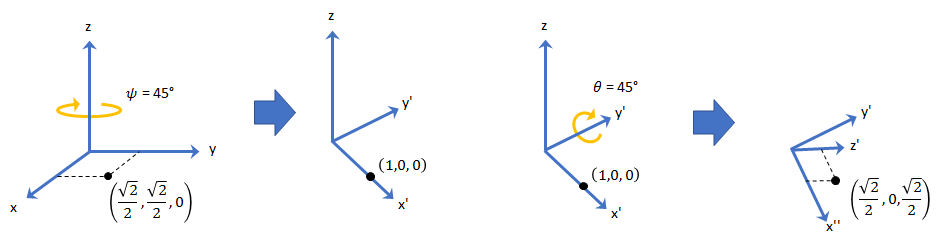
쿼터니언 회전자를 만들고 "YZX" 시퀀스를 지정하면 프레임은 먼저 y축을 중심으로 45도 회전한 다음 새로운 z축을 중심으로 45도 회전합니다.
quatRotator = quaternion([45,45,0],"eulerd","YZX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.8536 0.1464 0.5000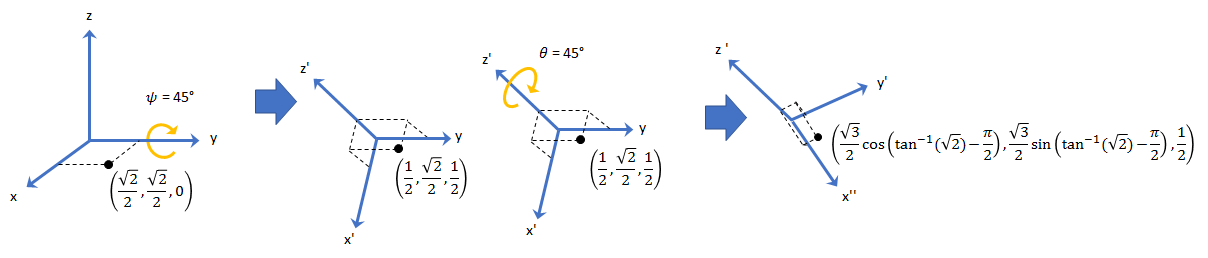
데이터형: char | string
변환으로, se3 객체로 지정되거나 se3 객체 요소를 N개 가진 배열로 지정됩니다. 여기서 N은 총 변환 수입니다.
quaternion 객체는 변환의 평행 이동 성분을 무시하고 변환의 회전 3×3 부분행렬을 쿼터니언으로 바꿉니다.
정규 직교 회전으로, so3 객체로 지정되거나 so3 객체 요소를 N개 가진 배열로 지정됩니다. 여기서 N은 총 회전 수입니다.