meanrot
쿼터니언 평균 회전
설명
quatAverage = meanrot(quat)quat 요소의 평균 회전을 반환합니다.
quat가 벡터인 경우meanrot(quat)는 요소의 평균 회전을 반환합니다.quat가 행렬인 경우meanrot(quat)는 각 열의 평균 회전이 포함된 행 벡터를 반환합니다.quat가 다차원 배열인 경우mearot(quat)는 크기가 1이 아닌 첫 번째 배열 차원을 따라 연산을 수행하며, 요소를 벡터로 처리합니다. 이 차원은 1이 되며, 다른 모든 차원의 크기는 동일하게 유지됩니다.
meanrot 함수는 입력 쿼터니언 quat를 정규화한 다음에 평균을 계산합니다.
quatAverage = meanrot(quat,dim)dim을 따라 평균 회전을 반환합니다. 예를 들어 quat가 행렬인 경우 meanrot(quat,2)는 각 행의 평균이 포함된 열 벡터입니다.
quatAverage = meanrot(___,nanflag)NaN 값을 포함할지 아니면 생략할지를 지정합니다. meanrot(quat,"includenan")은 모든 NaN 값을 포함하고 mean(quat,"omitnan")은 모두 무시합니다.
예제
오일러 각의 세 집합에 해당하는 쿼터니언으로 구성된 행렬을 만듭니다.
eulerAngles = [40 20 10; ... 50 10 5; ... 45 70 1]; quat = quaternion(eulerAngles,"eulerd","ZYX","frame");
쿼터니언으로 표현되는 평균 회전을 결정합니다. 가독성을 위해 평균 회전을 오일러 각(단위: 도)으로 변환합니다.
quatAverage = meanrot(quat)
quatAverage = quaternion
0.88863 - 0.062598i + 0.27822j + 0.35918k
eulerAverage = eulerd(quatAverage,"ZYX","frame")
eulerAverage = 1×3
45.7876 32.6452 6.0407
meanrot를 쿼터니언 시퀀스에 사용하여 가산성 잡음의 평균을 구합니다.
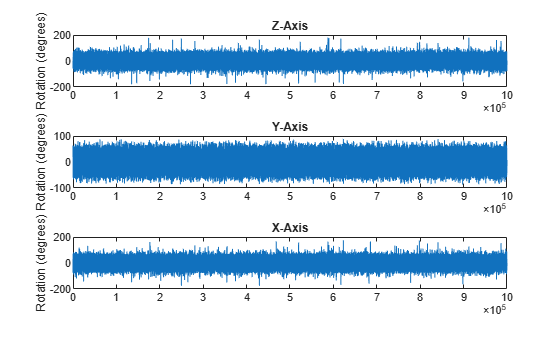
dist 함수의 정의에 따라 쿼터니언(1,0,0,0)으로부터의 거리가 정규분포를 이루도록 1e6개의 쿼터니언으로 구성된 벡터를 만듭니다. 잡음이 있는 쿼터니언 벡터에 해당하는 오일러 각을 플로팅합니다.
nrows = 1e6; ax = 2*rand(nrows,3) - 1; ax = ax./sqrt(sum(ax.^2,2)); ang = 0.5*randn(size(ax,1),1); q = quaternion(ax.*ang ,"rotvec"); noisyEulerAngles = eulerd(q,"ZYX","frame"); figure(1) subplot(3,1,1) plot(noisyEulerAngles(:,1)) title("Z-Axis") ylabel("Rotation (degrees)") hold on subplot(3,1,2) plot(noisyEulerAngles(:,2)) title("Y-Axis") ylabel("Rotation (degrees)") hold on subplot(3,1,3) plot(noisyEulerAngles(:,3)) title("X-Axis") ylabel("Rotation (degrees)") hold on
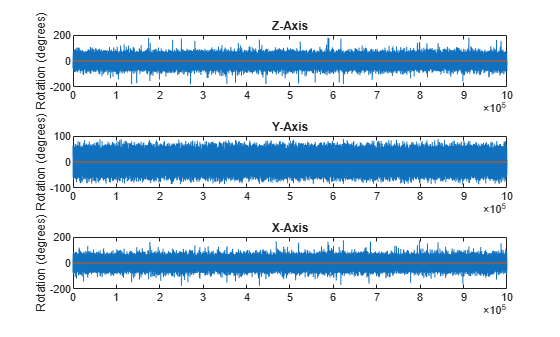
주어진 쿼터니언 벡터에 대해 meanrot를 사용하여 평균 쿼터니언을 구합니다. 오일러 각으로 변환하고 결과를 플로팅합니다.
qAverage = meanrot(q); qAverageInEulerAngles = eulerd(qAverage,"ZYX","frame"); figure(1) subplot(3,1,1) plot(ones(nrows,1)*qAverageInEulerAngles(:,1)) title("Z-Axis") subplot(3,1,2) plot(ones(nrows,1)*qAverageInEulerAngles(:,2)) title("Y-Axis") subplot(3,1,3) plot(ones(nrows,1)*qAverageInEulerAngles(:,3)) title("X-Axis")
meanrot 알고리즘
meanrot 함수는 회전 행렬 간 차이의 제곱 프로베니우스 노름을 최소화하는 쿼터니언을 출력합니다. 다음과 같은 쿼터니언이 두 개 있다고 가정합니다.
q0은 무회전을 표현합니다.q90은 x축 중심의 90도 회전을 표현합니다.
q0 = quaternion([0 0 0],"eulerd","ZYX","frame"); q90 = quaternion([0 0 90],"eulerd","ZYX","frame");
x축을 중심으로 0도에서 180도까지의 회전을 나타내는 쿼터니언 스윕 qSweep을 만듭니다.
eulerSweep = (0:1:180)'; qSweep = quaternion([zeros(numel(eulerSweep),2),eulerSweep], ... "eulerd","ZYX","frame");
q0, q90, qSweep을 회전 행렬로 변환합니다. 쿼터니언 스윕의 각 멤버에 대해 최소화하는 메트릭을 루프로 계산합니다. 결과를 플로팅하고 메트릭의 최솟값에 해당하는 오일러 스윕의 값을 반환합니다.
r0 = rotmat(q0,"frame"); r90 = rotmat(q90,"frame"); rSweep = rotmat(qSweep,"frame"); metricToMinimize = zeros(size(rSweep,3),1); for i = 1:numel(qSweep) metricToMinimize(i) = norm((rSweep(:,:,i) - r0),"fro").^2 + ... norm((rSweep(:,:,i) - r90),"fro").^2; end plot(eulerSweep,metricToMinimize) xlabel("Euler Sweep (degrees)") ylabel("Metric to Minimize")
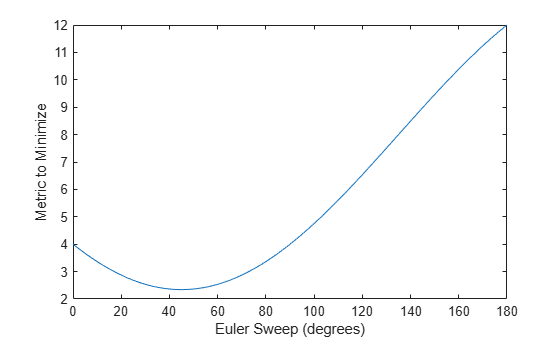
[~,eulerIndex] = min(metricToMinimize); eulerSweep(eulerIndex)
ans = 45
메트릭의 최솟값은 오일러 각 스윕의 45도에 해당합니다. 즉, meanrot는 quaterion([0 0 0],"ZYX","frame")과 quaternion([0 0 90],"ZYX","frame") 사이의 평균을 quaternion([0 0 45],"ZYX","frame")으로 정의합니다. q0과 q90과 함께 meanrot를 호출하여 결과가 동일한지 확인합니다.
eulerd(meanrot([q0,q90]),"ZYX","frame")
ans = 1×3
0 0 45.0000
제한 사항
meanrot가 평균 회전을 구하기 위해 사용하는 메트릭은 상당히 멀리 떨어진 쿼터니언의 경우에는 고유하지 않습니다. 180도로 분리된 쿼터니언에 대해 위의 실험을 반복합니다.
q180 = quaternion([0 0 180],"eulerd","ZYX","frame"); r180 = rotmat(q180,"frame"); for i = 1:numel(qSweep) metricToMinimize(i) = norm((rSweep(:,:,i) - r0),"fro").^2 + ... norm((rSweep(:,:,i) - r180),"fro").^2; end plot(eulerSweep,metricToMinimize) xlabel("Euler Sweep (degrees)") ylabel("Metric to Minimize")
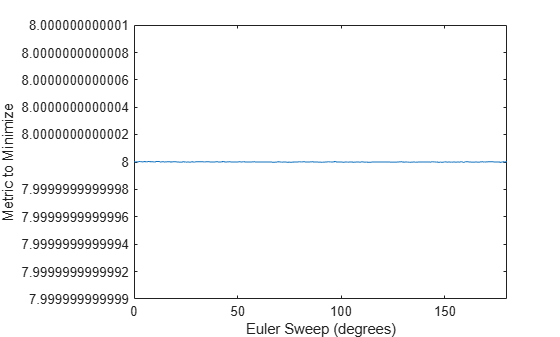
[~,eulerIndex] = min(metricToMinimize); eulerSweep(eulerIndex)
ans = 49
쿼터니언 평균은 일반적으로 서로 가까운 회전에 대해 계산되므로 이 예제에서 보이는 극단적인 경우는 실제 응용 사례에서 발생할 가능성이 적습니다. 상당히 멀리 떨어진 두 쿼터니언의 평균을 구하려면 slerp 함수를 사용하십시오. slerp를 사용하여 실험을 반복하고 반환된 쿼터니언 평균이 먼 거리에서 더 직관적인지 확인합니다.
qMean = slerp(q0,q180,0.5); q0_q180 = eulerd(qMean,"ZYX","frame")
q0_q180 = 1×3
0 0 90.0000
입력 인수
출력 인수
참고 문헌
[1] Markley, F. Landis, Yang Chen, John Lucas Crassidis, and Yaakov Oshman. "Average Quaternions." Journal of Guidance, Control, and Dynamics. Vol. 30, Issue 4, 2007, pp. 1193-1197.
확장 기능
버전 내역
R2019b에 개발됨