rotatepoint
쿼터니언 점 회전
설명
rotationResult = rotatepoint(quat,cartesianPoints)quat를 사용하여 카테시안 점을 회전시킵니다. 쿼터니언의 요소는 회전에 사용되기 전에 정규화됩니다.

예제
3차원에서 점을 정의합니다. 점의 좌표는 항상 x, y, z 순서로 지정됩니다. 시각화 편의를 위해 x-y 평면에서 점을 정의합니다.
x = 0.5; y = 0.5; z = 0; plot(x,y,"ko") hold on axis([-1 1 -1 1])
2개의 회전을 지정하는 쿼터니언 벡터를 만듭니다. z축을 중심으로 한 벡터는 점을 45도 회전시키고 다른 벡터는 점을 -90도 회전시킵니다. rotatepoint를 사용하여 회전을 수행합니다.
quat = quaternion([0,0,pi/4; ... 0,0,-pi/2],"euler","XYZ","point"); rotatedPoint = rotatepoint(quat,[x,y,z])
rotatedPoint = 2×3
-0.0000 0.7071 0
0.5000 -0.5000 0
회전된 점을 플로팅합니다.
plot(rotatedPoint(1,1),rotatedPoint(1,2),"bo") plot(rotatedPoint(2,1),rotatedPoint(2,2),"go")
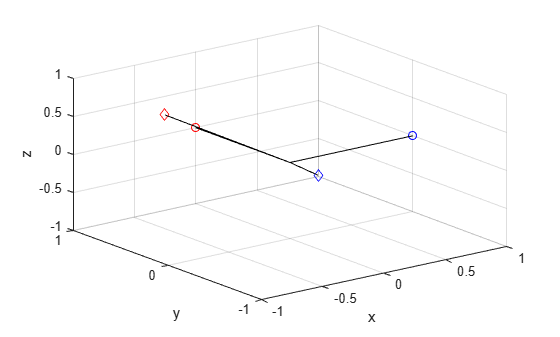
3차원 공간에서 두 점을 정의합니다. 먼저 z축을 중심으로 30도 회전한 다음 새로운 y축을 중심으로 45도 회전하여 점을 회전시킬 쿼터니언을 정의합니다.
a = [1,0,0]; b = [0,1,0]; quat = quaternion([30,45,0],"eulerd","ZYX","point");
rotatepoint를 사용하여 쿼터니언 회전 연산자로 두 점을 회전시킵니다. 결과를 표시합니다.
rP = rotatepoint(quat,[a;b])
rP = 2×3
0.6124 0.5000 -0.6124
-0.3536 0.8660 0.3536
점의 원래 방향과 회전된 방향을 시각화합니다. 원점에서 각 점까지 선을 그려 시각화합니다.
plot3(a(1),a(2),a(3),"bo"); hold on grid on axis([-1 1 -1 1 -1 1]) xlabel("x") ylabel("y") zlabel("z") plot3(b(1),b(2),b(3),"ro") plot3(rP(1,1),rP(1,2),rP(1,3),"bd") plot3(rP(2,1),rP(2,2),rP(2,3),"rd") plot3([0;rP(1,1)],[0;rP(1,2)],[0;rP(1,3)],"k") plot3([0;rP(2,1)],[0;rP(2,2)],[0;rP(2,3)],"k") plot3([0;a(1)],[0;a(2)],[0;a(3)],"k") plot3([0;b(1)],[0;b(2)],[0;b(3)],"k")
입력 인수
출력 인수
알고리즘
쿼터니언 점 회전은 다음과 같이 지정된 쿼터니언에 따라 R3에 지정된 점을 회전시킵니다.
여기서 q는 쿼터니언이고, *는 켤레를 나타냅니다. u는 회전할 점으로, 쿼터니언으로 지정됩니다.
편의를 위해 rotatepoint 함수는 R3의 점을 받아서 R3로 점을 반환합니다. 예를 들어 다음과 같이 임의의 쿼터니언 q = a + bi + cj + dk 및 임의의 좌표 [x,y,z]를 갖는 함수 호출이 주어지는 경우,
rereferencedPoint = rotatepoint(q,[x,y,z])
rotatepoint 함수는 다음 연산을 수행합니다.
점 [x,y,z]를 쿼터니언으로 변환합니다.
쿼터니언 q를 정규화합니다.
회전을 적용합니다.
쿼터니언 출력값 vq를 다시 R3으로 변환합니다.
확장 기능
버전 내역
R2019b에 개발됨