dist
각거리(단위: 라디안)
설명
distance = dist(quatA,quatB)quatA와 quatB 간의 각거리(단위: 라디안)를 반환합니다.
예제
입력 인수
출력 인수
알고리즘
dist 함수는 두 쿼터니언 간의 각거리를 반환합니다.
쿼터니언은 다음과 같이 축 (ub,uc,ud)와 회전 각도 θq로 정의될 수 있습니다. .
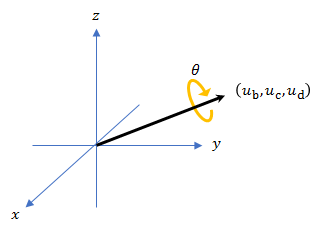
쿼터니언이 형식으로 주어졌을 때(a가 실수부임), q의 각도를 로 구할 수 있습니다.
두 쿼터니언 p와 q 그리고 곱 가 있습니다. p가 q에 가까워지면 z의 각도는 0이 되고 z는 단위 쿼터니언에 가까워집니다.
두 쿼터니언 사이의 각거리는 로 표현할 수 있습니다.
quaternion 데이터형 구문을 사용하면 각거리가 다음과 같이 계산됩니다.
angularDistance = 2*acos(abs(parts(p*conj(q))));
확장 기능
버전 내역
R2019b에 개발됨