이 페이지의 내용은 이전 릴리스에 관한 것입니다. 해당 영문 페이지는 최신 릴리스에서 제거되었습니다.
라이다 처리
첨단 운전자 보조 시스템은 라이다 스캔을 통해 얻은 3차원 포인트 클라우드를 사용하여 물리적 곡면을 측정합니다. 라이다 포인트 클라우드 처리를 사용하면 이러한 포인트 클라우드를 등록하거나 클러스터로 분할하기 전에 다운샘플링, 잡음 제거, 변환을 수행할 수 있습니다. 또한 Velodyne 패킷 캡처(PCAP) 파일에서 가져온 포인트 클라우드 등의 포인트 클라우드를 읽고, 쓰고, 저장하고, 표시하고, 비교할 수도 있습니다.
딥러닝 접근법을 사용하여 라이다 포인트 클라우드에서 도로 차선을 검출할 수도 있습니다. Automated Driving Toolbox™는 K-Lane 데이터 세트에 대해 훈련된 라이다 차선 검출 신경망을 제공합니다. 사전 훈련된 신경망을 사용하면 최대 6개의 차선을 검출할 수 있습니다. 분류 정확도, 정밀도, 재현율, F1 점수 등 다양한 메트릭을 사용하여 검출기의 성능을 평가할 수도 있습니다.
라이다 포인트 클라우드의 차선을 검출하려면 애드온 탐색기에서 Automated Driving Toolbox Model for Lidar Lane Detection 지원 패키지를 다운로드합니다. 애드온 다운로드에 대한 자세한 내용은 애드온을 받고 관리하기 항목을 참조하십시오.
함수
도움말 항목
- Get Started with Lidar Lane Detection Using Deep Learning
Use lidar lane detection network to detect road lanes.
- Detect, Classify, and Track Vehicles Using Lidar (Lidar Toolbox)
Detect, classify, and track vehicles by using lidar point cloud data captured by a lidar sensor mounted on an ego vehicle.
추천 예제

Ground Plane and Obstacle Detection Using Lidar
Detect the ground plane and find nearby obstacles in 3-D lidar data.
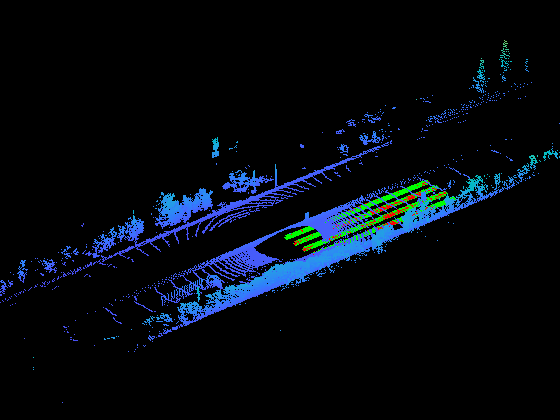
Lane Detection in Lidar Data Using Deep Learning
Detect lanes in lidar point clouds using LLDN-GFC deep learning network.