pcnormals
포인트 클라우드의 법선 추정
설명
예제
포인트 클라우드를 불러옵니다.
load('object3d.mat');법선 벡터를 추정합니다.
normals = pcnormals(ptCloud); figure pcshow(ptCloud) title('Estimated Normals of Point Cloud') hold on
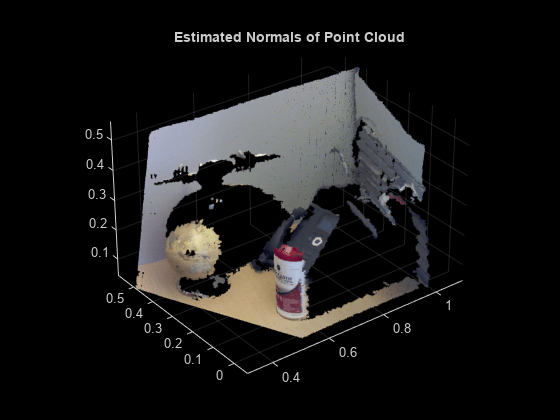
x = ptCloud.Location(1:10:end,1:10:end,1); y = ptCloud.Location(1:10:end,1:10:end,2); z = ptCloud.Location(1:10:end,1:10:end,3); u = normals(1:10:end,1:10:end,1); v = normals(1:10:end,1:10:end,2); w = normals(1:10:end,1:10:end,3);
법선 벡터를 플로팅합니다.
quiver3(x,y,z,u,v,w);
hold off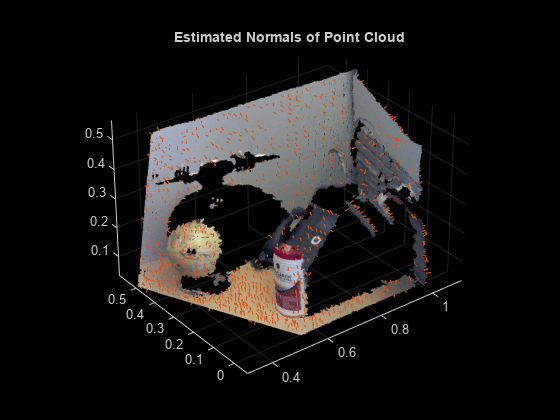
센서 위치를 향하도록 법선을 뒤집습니다. 이 단계는 곡면의 안쪽 또는 바깥쪽 방향을 결정하는 경우에만 필요합니다. 센서 중심은 x, y, z 좌표로 설정됩니다.
sensorCenter = [0,-0.3,0.3]; for k = 1 : numel(x) p1 = sensorCenter - [x(k),y(k),z(k)]; p2 = [u(k),v(k),w(k)]; % Flip the normal vector if it is not pointing towards the sensor. angle = atan2(norm(cross(p1,p2)),p1*p2'); if angle > pi/2 || angle < -pi/2 u(k) = -u(k); v(k) = -v(k); w(k) = -w(k); end end
조정된 법선을 플로팅합니다.
figure pcshow(ptCloud) title('Adjusted Normals of Point Cloud') hold on quiver3(x, y, z, u, v, w); hold off

입력 인수
출력 인수
참고 문헌
[1] Hoppe, H., T. DeRose, T. Duchamp, J. Mcdonald, and W. Stuetzle. "Surface Reconstruction from Unorganized Points". Computer Graphics (SIGGRAPH 1992 Proceedings). 1992, pp. 71–78.
확장 기능
버전 내역
R2015b에 개발됨
참고 항목
pointCloud | pcplayer | pcshow | pcwrite | pcmerge | pcfitplane | planeModel | pctransform | pcdownsample | pcdenoise | pcregistericp