자동차
MathWorks® 자동차 제품을 사용하여 엔지니어는 차량 개발 공정을 가속화하고 안전성, 안락감 및 성능에 관한 시장의 요구 사항을 충족하는 차량을 출시할 수 있습니다. 자동차 엔지니어는 소프트웨어를 사용하여 다음을 수행할 수 있습니다.
차량 연비, 배기 및 성능에 대한 시뮬레이션을 실행합니다.
자율 주행 시스템의 인식, 계획 및 제어 알고리즘을 개발하고 테스트합니다.
신속 프로토타이핑을 통해 요구 사항을 조기에 검증합니다.
프로토타이핑이나 프로덕션을 위해 MCU, GPU, SoC, FPGA 소자에 사용할 부동소수점 또는 고정소수점 코드를 생성합니다.
테스트 플릿(test fleet) 차량 데이터와 프로덕션 차량 데이터를 분석합니다.
ASPICE, AUTOSAR 및 ISO 26262 안전 표준을 준수합니다.
자동차 관련 제품
도움말 항목
전동화된 차량
- Develop, Resize, and Calibrate Motors with Dynamometer Test Harness (Powertrain Blockset)
Develop a control test bench, resize e-motors, and calibrate controllers using the motor dynamometer reference application. - Build Full Electric Vehicle Model (Powertrain Blockset)
Build a vehicle with a motor-generator, battery, direct-drive transmission, and powertrain control algorithms using the electric vehicle (EV) reference application. - Hybrid and Electric Vehicle Reference Application Projects (Powertrain Blockset)
Start building your own hybrid and electric vehicle models with reference application projects. - Generate Optimal Current Controller Calibration Tables for Permanent Magnet Synchronous Motors (Powertrain Blockset)
Generate optimized current controller and flux parameters for permanent magnet synchronous motor (PMSM) blocks. - Preprocess Permanent Magnet Synchronous Motor (PMSM) Data and Autogenerate Current Controller Calibration Tables (Model-Based Calibration Toolbox)
Permanent magnet synchronous motor (PMSM) data preprocessing.
자율 주행 및 첨단 운전 보조 시스템
- Code Generation for Path Planning and Vehicle Control (Automated Driving Toolbox)
Generate C++ code for a path planning and vehicle control algorithm, and verify the code using software-in-the-loop simulation. - 가져온 GIS 자산 주변에 도로 만들기 (RoadRunner)
지리 정보 시스템 자산을 참조하여 도로 네트워크를 구축하세요. - Forward Collision Warning Application with CAN FD and TCP/IP (Automated Driving Toolbox)
Execute a forward collision warning application with sensor and vision data replayed live via CAN FD and TCP/IP protocols. - Import RoadRunner Scene into Unreal Engine Using Simulink (Simulink 3D Animation)
Use Simulation 3D Scene Configuration block to import RoadRunner scene and generate semantic segmentation and vision detection data.
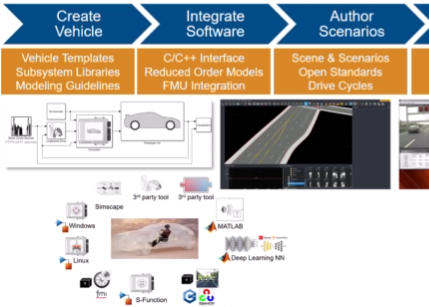
가상 차량 프로토타이핑 및 설계 최적화
- Get Started with the Virtual Vehicle Composer (Vehicle Dynamics Blockset)
Use the Virtual Vehicle Composer app to configure, build, test, and analyze a virtual vehicle. - Double-Lane Change Maneuver (Vehicle Dynamics Blockset)
Analyze vehicle ride and handling, including yaw stability, using this reference application. - Kinematics and Compliance Virtual Test Laboratory (Vehicle Dynamics Blockset)
Virtually calibrate suspension blocks using this reference application. - Longitudinal Motorcycle Braking Test (Vehicle Dynamics Blockset)
Analyze motorcycle ride and handling during a braking test using this reference application.
파워트레인 프로토타이핑, 설계 최적화 및 보정
- Internal Combustion Engine Reference Application Projects (Powertrain Blockset)
Use these reference applications as a starting point for your own internal combustion engine vehicle models. - Optimize Transmission Control Module Shift Schedules (Powertrain Blockset)
Use the conventional vehicle reference application to optimize the transmission control module (TCM) shift schedules. - Detect Misfires Using On-Board Diagnostics (Powertrain Blockset)
Implement onboard-diagnostics (OBD) to detect and report engine misfires. - Predict Engine Torque Using Two-Stage Modeling (Model-Based Calibration Toolbox)
Create a statistical engine model that predicts engine brake torque as a function of spark angle.
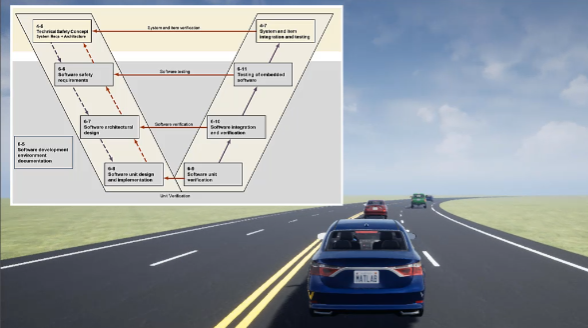
표준 준수, 코드 검증 및 확인(V&V)
- Develop AUTOSAR Software Component Model (AUTOSAR Blockset)
Learn the basics of developing AUTOSAR classic software components in the Simulink® environment. - Generate Drive Cycles for Real Driving Emissions (Powertrain Blockset)
Meet the Real Driving Emissions standard required by the European Union. - Highway Lane Following: A Model-Based Design Example for ISO 26262:2018 (IEC Certification Kit)
Demonstrates the use of Simulink to apply a Model-Based Design workflow to an ISO 26262 ASIL D project. - Implement Distributed ECU Network over CAN in Simulink (Vehicle Network Toolbox)
Use Vehicle Network Toolbox™ and Simulink to implement a distributed Electronic Control Unit (ECU) network over CAN for an automobile.
추천 예제

Adaptive Cruise Control with Sensor Fusion
Implement an automotive adaptive cruise controller using sensor fusion.

Create and Configure AUTOSAR Software Component
Create an AUTOSAR software component model from an algorithm model.

Build Full Electric Vehicle Model
Build a vehicle with a motor-generator, battery, direct-drive transmission, and powertrain control algorithms using the electric vehicle (EV) reference application.

Develop, Resize, and Calibrate Motors with Dynamometer Test Harness
Develop a control test bench, resize e-motors, and calibrate controllers using the motor dynamometer reference application.

Train a Deep Learning Vehicle Detector
Train a vision-based vehicle detector using deep learning.

Visualize Automated Parking Valet Using Unreal Engine Simulation
Visualize vehicle motion in Unreal Engine® using a parking valet system constructed in Simulink.
비디오
하이브리드 전기차
모델 기반 설계를 사용한 하이브리드 전기차(HEV) 시스템 개발에 대해 알아봅니다.
전기차 모델링: 파워트레인, 배터리, 열 시스템
전기차용 배터리 팩을 설계하고 최적화합니다.
모델 기반 설계로 ISO 26262를 준수하는 ADAS 애플리케이션 개발
IEC Certification Kit을 사용하여 툴 검증을 위한 기능 안전 요구 사항을 충족합니다.